Å lage en selvkjørende bil er ikke fullt så enkelt som å kombinere en datamaskin og sensorer som kan se omverdenen.
En slik bil må også trenes opp, og vise at den kan håndtere de situasjonene som dukker opp, gjennom en valideringsprosess.
En ny metode utviklet av forskere ved University of Michigan kan på sikt gjøre en slik prosess nærmest gratis sammenlignet med i dag, melder universitetet.
De har utviklet en metode som kan gi en dramatisk reduksjon i antall kilometer bilene må kjøre for å samle inn data.
Dataene, som brukes til opptrening av kunstig intelligens, er vesentlig i dag.
Millioner av kilometer kjørt. Milliarder trengs
Tesla og Waymo er blant selskapene som jobber med dette, og samler inn data fra den virkelige verden for å trene opp programvaren sin.
Det er en kostbar affære. Waymos bilflåte har til nå kjørt over 4,8 millioner kilometer, alle med minst én fører i bilen.
Tesla samler inn sine data på en annen måte, ved at de bruker data fra kundenes biler. I fjor høst avslørte Elon Musk at de har to milliarder kilometer med data.

Men skal vi tro en analyse (PDF) fra RAND er det behov for over 18 milliarder kilometer med data før en autonom bil kan sies å være 20 prosent tryggere enn en person bak rattet.
.png)

Ifølge analyseselskapet Oppenheimer (PDF), er dette en viktig grunn til at Tesla vil ha Model 3 på veien så raskt som mulig, og i så stort antall som mulig. Mange biler, alle med Teslas Autopilot-maskinvare, på veien vil gi dem fordelen av svært mye data som kan brukes til å utvikle selvkjørende biler.
- Ny rapport om selvkjørende biler: – Kjøper du ny bil i dag, kommer det til å bli din siste
Kan gjøre kjøringen overflødig
Mobilitetsforskerne i Michigan foreslår i en artikkel (PDF) en metode som kan gjøre alt dette arbeidet overflødig.
Prosessen kan redusere tiden det tar å evaluere selvkjørende bilers evner til å håndtere potensielt farlige situasjoner 300 til 100.000 ganger. Dette kan spare 99,9 prosent av kostnadene og tiden det tar å teste selvkjørende biler, ifølge forskerne.
Metoden innebærer å eksponere bilene for simulerte, vanskelige situasjoner fra den virkelige verden mange ganger. Det vil redusere behovet for å samle inn store mengder data.

De tror at 1000 kjørte kilometer da kan tilsvare 300.000 til en million kilometer kjørt i det virkelige liv. Ifølge forskerne inntreffer en dødsulykke hver 160 millioner kjørte kilometer. Disse ulykkesscenarioene er dermed sjeldne, og bilene må trene spesielt på dem.


Det vil derfor ta lang til å trene opp biler ved å fysisk kjøre dem på veien. For å bevise at en førerløs bil er 90 prosent tryggere enn en menneskelig sjåfør med 80 prosent sikkerhet, trengs mange, mange år med testing.
- Ny rapport om autonome biler: Ford best, Tesla på 12. plass
Konsentrerte data
De har derfor analysert data fra 40 millioner kilometer, samlet inn fra to andre prosjekter ved universitetet over to år, og identifisert hvilke interaksjoner mellom selvkjørende og vanlige biler som er vesentlige.
De har så «konsentrert» ned disse dataene, og simulert dem. Simuleringen er i tillegg programmert til å anse biler kjørt av mennesker som den største trusselen, og tilfeldig plassert menneskelige sjåfører i simuleringen.
Deretter har de beregnet risiko og sannsynlighet for visse utfall, som kollisjon, skader og nestenulykker.
Basert på dette har de utviklet en teknikk kalt «importance sampling» for å lære hvordan den selvkjørende bilen statistisk sett vil håndtere ulike kjøresituasjoner.
Langt fra ferdigutviklet
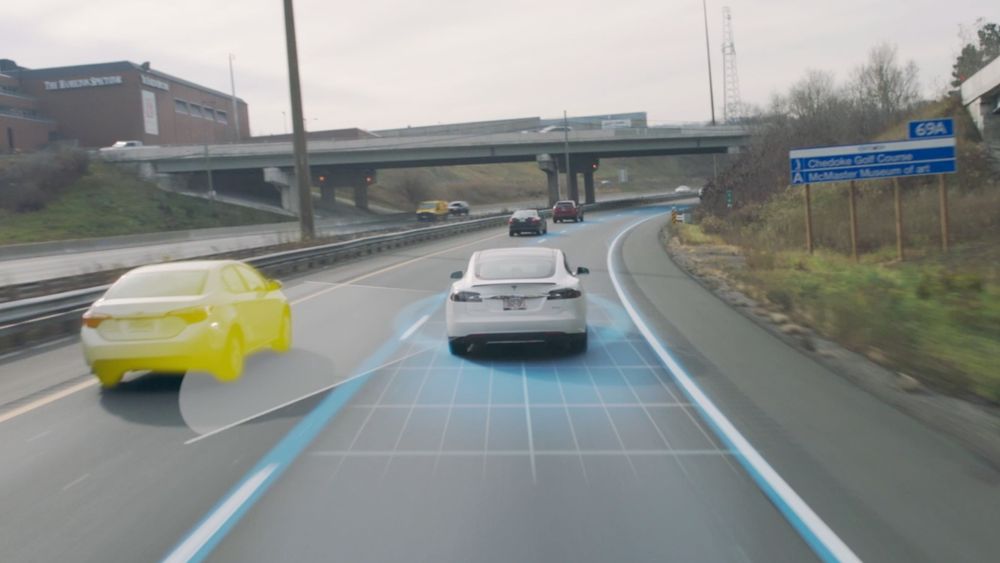
Det er særlig to situasjoner forskerne har vurdert, som de anser å ha stort potensiale for alvorlige ulykker. Det ene er når den selvkjørende bilen følger etter en vanlig bil. Det andre er situasjoner hvor en vanlig bil fletter inn foran den selvkjørende bilen.
Altså er ikke metoden ferdig utviklet, ettersom det jo utspiller seg et stort antall andre situasjoner som raskt kan utvikle seg til ulykker på veiene hver dag.
De ønsker blant annet å inkludere situasjoner med syklister og fotgjengere, og situasjoner hvor kun to kjøretøyer er involvert.
Mer forskning og utvikling er derfor nødvendig, men forskerne skriver at de tror at dette kan være en revolusjonerende metode for å få til raskere og billigere testing, som kan føre til at flere selvkjørende biler kan komme på veien.
- Les flere artikler om selvkjørende biler.



