– Vi flytter grenser under vann, sier Asgeir Johan Sørensen fra NTNU.
Det professoren, som er direktør for NTNU AMOS (senter for autonome marine operasjoner og systemer) mener er grensesprengende, er muligheten til kontaktløs lading under vann, nesten uten effektsvinn.
Blue Logic i Sandnes, med sine 15 ansatte, står bak Subsea USB, et universelt induktivt grensesnitt for overføring av strøm og kommunikasjon under vann, som kan brukes til undervannslading av trådløse droner. Ladesystemet er designet for å tåle en trøkk, og er blant annet testet for sjokk og vibrasjon.
– Den induktive koblingen tåler vanntrykket ned til 4500 meters dybde, sier partner og forretningsutvikler i Blue Logic, Helge Sverre Eide, entusiastisk.
Blue Logic og gründerne bak har syslet med kontaktløs lading siden 2006. Arbeidet, som skjøt fart for fem år siden, er finansiert av selskapet og Innovasjon Norge.
- Kraftkilde basert på aluminium og vann: Tidobler rekkevidden til undervannsdroner
Lader med induksjon
For å få til kontaktløs lading brukes induksjon. Magnetfeltet mellom de magnetiske spolene i ladeplate og drone, fyller batteripakken med strøm. En litt større drone kan ha en batteripakke på opp mot 30 kWh. Foreløpig har Blue Logics koblinger kapasitet på 50 W, 250 W og 2 kW.
– Vi jobber med en kobling på 10 kW. Da lades en drone med 30 kWh batteri på kun tre timer, sier Eide.
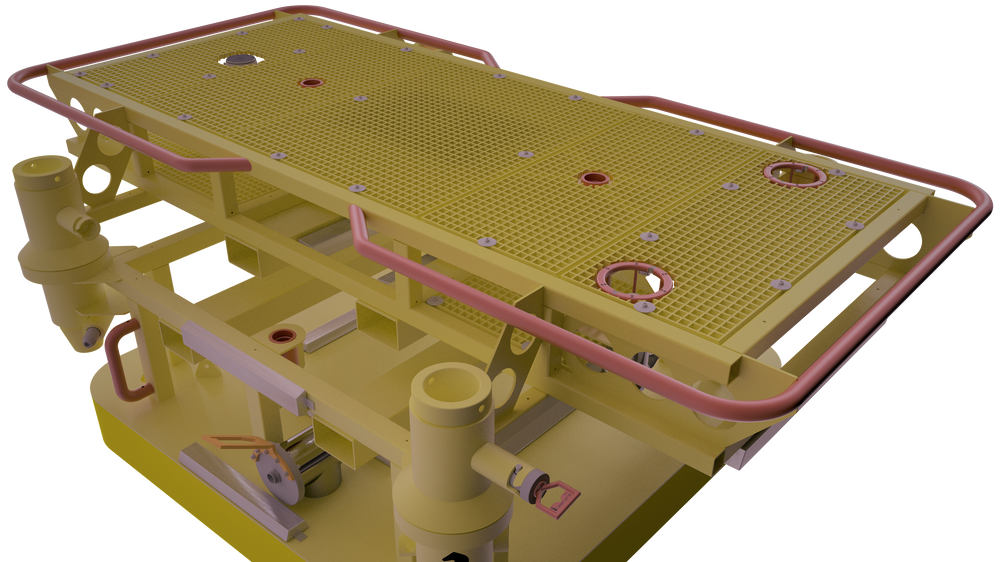
Når en drone vender tilbake til en ladestasjon, finner den veien ved hjelp av elektronisk kompass, treghetssensorer og andre elektroniske verktøy siden den ikke har tilgang til GPS under vann. Når dronen får visuell kontakt med ladeplattformen, avleser den ChArUco-koden på toppen av ladeplattformen og fininnstiller posisjoneringen til ladepunktet ut fra den relative posisjonen til denne koden.
ChArUco-kode
En ChArUco-kode ligner et sjakkbrett med QR-aktige koder i de hvite feltene. Navnet er satt sammen av ordene Chess og ArUco. Sjakkbrettets svarte felt avgrenser ArUco-kodene som brukes til å kalibrere kamera.

Det er bare cirka 0,5 centimeters klaring fra dronen til koblingspunktene, men havvannet som legger seg mellom koblingspunktene kan redusere effekten. Ifølge Blue Logic har de minimert effektsvinnet.
– Saltvannet kan redusere virkningsgraden med opp til 30 prosent. Ved hjelp av patentert teknologi fra WPC, opprettholder våre koblinger en virkningsgrad på 94 prosent, sier Eide som også er daglig leder i WPC (Wireless Power and Communications AS), et søsterselskap til Blue Logic.
Undervannsinstallasjoner kan dekkes av slam og sand, og gros til med bunndyr. Dette fjernes med høytrykksspyling.
– Utstyret er også dekket med et belegg som hindrer begroing. Dessuten, ingenting av det som gror der nede, er magnetisk, tilføyer Eide med et smil.
Koblingspunktene er dekket av plast for å unngå rust. Siden koblingene ikke berører hverandre, unngås mekanisk slitasje. Dette skal forlenge ladeplatas levetid. Mens dronen lades, overføres innsamlet data samtidig som dronen mottar nye arbeidsoppgaver.
Standardisert lading
Med denne lademuligheten, som ikke krever spesialbygde ladeplater for hver dronetype, har teknologibedriftene sammen med Equinor fått en standard å bygge videre på.

– Standardisering er nøkkelen, sier Gro Stakkestad som leder arbeidet med undervannsdroner i Equinor.
Kommunikasjon med trådløse droner
- Radiobølger fungerer dårlig under vann, mens kommunikasjon via lys gir høy båndbredde og akustikk lang rekkevidde. Akustikk har imidlertid lav datahastighet og relativt høy tidsforsinkelse.
- Begrensninger i kommunikasjon håndteres ved at de trådløse dronene er mer selvstendige. Økt selvstendighet oppnås ved å kombinere sensorer som maskinsyn med innebygde digitale kart (digital twin) og en høyere grad av autonomitet. For å ivareta sikkerheten vil mennesker fortsatt overvåke dronens aktivitet, men dette vil skje på et gradvis høyere nivå der mennesket for eksempel må godkjenne kritiske skritt i en prosedyre, eller bli gjort oppmerksom på uregelmessigheter under en inspeksjon som krever ytterligere oppmerksomhet.
- Under de rette forutsetningene kan dronene fjernstyres av en pilot i ett kontrollrom på land. Dette gjør at permanent installerte droner raskt kan reagere på uventa situasjoner før man eventuelt kan avlastes av IMR-fartøy som er nødvendig for tyngre operasjoner.
Kilde: Equinor
Equinor har designet plattformen som dronen hviler på under lading. Målet er en åpen standard som fritt kan benyttes av ulike droner og selskap. Stakkestad ønsker leverandørindustrien velkommen til å utvikle droner og droneverktøy tilpasset dette.
Tradisjonelt er undervannsfarkoster avhengig av IMR-skip (Inspection, Maintenance, Repair) til å inspisere og vedlikeholde undervannsinstallasjonene. Personellet om bord fjernstyrer undervannsfartøy som er koblet til skipet med kabel. Målet er å overføre flere av disse oppgavene til droner som stasjoneres på havbunnen.
Disse fast stasjonerte dronene kan operere autonomt, samtidig som de også kan fjernstyres fra land.
Etterhvert som teknologien utvikles, regner Equinor med at dronene kan ta på seg mer komplekse oppgaver som å installere nytt utstyr.
Ifølge Equinor gir droner lavere utslipp av klimagasser enn ved bruk av IMR-skip som er spesielt utstyrt for inspeksjon og vedlikehold. De er tryggere for mannskapet siden dronene fjernstyres fra land. Droner på havbunnen opererer også uavhengig av uvær og bølger på overflaten. Dessuten er de billigere.
– Dette er både en stor forbedring og forenkling. Ved hjelp av droner kan vi kontinuerlig overvåke anleggene på havbunnen. Vi forventer kjappere responstid ved eventuelle hendelser. En drone kan sendes ut i løpet av noen minutter, mens et IMR-skip kan måtte bruke flere timer på å nå fram til det aktuelle stedet, sier Stakkestad.
- Den norske undervannsdronen er ett år forsinket: Men nå starter produksjonen (TU Ekstra)
Testes til våren
Blue Logic har sendt fundamentet for den første teststasjonen for undervannsdroner til NTNU i Trondheim. I samarbeid med Equinor monteres den på havbunnen utenfor Munkholmen i Trondheimsfjorden.
Teststasjonen skal brukes til forsknings- og undervisningsformål. De første testoperasjonene under vann, uten støtte fra overflatefartøy, starter våren 2019. Operasjonene vil være fjernstyrte og delvis autonome, samtidig som de overvåkes fra et operasjonssenter på land. NTNU ser for seg at teststasjonen kan brukes til generell marinforskning og havovervåkning utover petroleumsbransjen.
– Vi ser for oss at ubemannede autonome fartøy (AUV) kan patruljere hav- og kystområdene og ha ladestasjonene som hjem for lading av energi, overføring av data og mottak av nye oppdrag, sier Asgeir Johan Sørensen fra NTNU.
Equinor håper ladeteknologien til Blue Logic blir en del av en åpen standard for kommende undervannsdroner
– De første dronene som lades uten ledning på havbunnen, kan være klare til bruk allerede i 2020, sier Stakkestad.
- Jakten på MH370: Åtte høyteknologiske undervannsdroner skal finne flyvraket




