Førerassistentsystemene har utviklet seg mye de siste årene.
Fra enkle fartsholdere har vi nå avanserte assistenter som leser skilt, veimerking og -forhold. Synes du likevel den presterer dårlig til tider? Vel, en del av grunnen kan være at førerassistenten egentlig har ganske elendige arbeidsforhold. For infrastrukturen – veien – er fortsatt tilpasset mennesket, ikke maskinene.
Det påpeker Ane Dalsnes Storsæter, som nylig har avlagt doktorgrad om hvordan veiene kan tilpasses automatiserte førere.
.png)

– Mennesker og maskiner ser veiene svært forskjellig. Vi bør anse den automatiserte bilen som en helt ny veibruker og ta hensyn til hvordan den oppfatter verden, sier Storsæter.
Storsæter, som i dag leder Products R & -avdelingen hos Q-Free, gjennomførte omfattende litteraturstudier og egne tester både i laboratoriet og på veien. Så utformet hun prinsipper for hvordan man kan tilpasse veiene maskinene.
Her er fem av Storsæters mest interessante forslag:
1) Lag sensorsentrerte parametre
Veiene er utformet etter blant annet øyehøyde og objekthøyde, forteller Storsæter. Føreren skal for eksempel kunne se et objekt fra en viss vinkel på en viss avstand.
Øyehøydeverdien er beregnet fra statistiske opplysninger om førerhøyde og personbilparken, mens objekthøyden er høyden på en gjenstand som det forutsettes at en bilfører klarer å stoppe for.
Dette er ikke overførbart til maskinene. Parkeringssensorer er plassert slik at de har et lavere utgangspunkt enn mennesket, kameraer er ofte plassert i øyehøyde, mens lidar gjerne står høyere.
Storsæter mener man heller bør bruke parameterne objektdeteksjon og siktlinje for å utforme veiene for automatisert kjøring. Veiene bør lages slik at sensorene har tilstrekkelig sikt på en viss avstand.
2) Utnytt sensorenes styrker
Videre mener Storsæter man bør utnytte sensorenes styrker (se faktaboks) mye bedre.
Sensorer kan kombineres for et langt bredere synsfelt enn det menneskelige øyet.
De kan også oppfatte mye større deler av det elektromagnetiske spekteret. Det kan blant annet utnyttes til å utforme skiltene annerledes.
Maskinens sanser
Doktorgraden beskriver hvordan mennesker og maskiner oppfatter verden forskjellig:
- Mennesker ser, hører, lukter og bruker kognitive evner for å kombinere dette med oppfattelse av balanse, temperatur, trykk, orientering og smerte. Mennesker er veldig gode til å generalisere informasjon og å filtrere ut hva som er viktig i en kjøresituasjon, erfaring er derfor viktig.
- Menneskesynet kan erstattes av både kamera, radar, lidar og ultralyd. Sensorene kan ha ulike synsfelt og registrere forskjellige deler av det elektromagnetiske spekteret – også det som ikke er synlig for øyet. Lidar og radar sender aktivt ut signaler og danner en oppfattelse av verden basert på signalene som returnerer.
- Et sett av sensorer kan gi den automatiserte bilen mulighet for større sensitivitet i det elektromagnetiske spektrumet og et langt større synsfelt enn mennesket.
- Det finnes sensorer som kan gjenkjenne lukt. Akselerometre, gyroskoper og GPS gir informasjon om hastighet, posisjon og retning.
- Menneskets kognitive evner erstattes av maskiner som må tolke dataene fra sensorene og ta riktig avgjørelse. Datamaskinene kan kombinere data fra ulike sensorer for å utnytte teknologiens fordeler og ulemper, og maskinlæring kan hjelpe til med objektgjenkjenning også under vanskelige forhold.
- Maskiner baserer seg på andre visuelle markører enn mennesket for objektgjenkjenning. For eksempel er maskinene generelt sett dårligere enn mennesker på brede kategoriseringer (som å identifisere et dyr), men bedre på å identifisere små variabler (som fugleart på et bilde).
For eksempel kan de ha flere lag med informasjon hvor noe er synlig for mennesker, mens et annet lag brukes til å kode informasjon som kun er synlig for sensorer. Produsenten 3M tilbyr dette allerede i dag.
De aktive sensorenes (radar, lidar og ultralyd) retursignal påvirkes av overflateteksturen. Det kan utnyttes i veiutformingen, for eksempel ved å bevisst velge glatte eller rue overflater for å gi forskjellige beskjeder, sier Storsæter.


3) Mer fargerike veier
Farger og kontraster kan brukes til å gjøre elementer i veien mer synlige, avhengig av hvordan bildeinformasjonen fanges og tolkes, forteller Storsæter.
I dag er mye av veiinfrastrukturen grå og hvit, samtidig som det er vanlig å tolke bildeinformasjon i gråtoner. Det gjør at forskjellige elementer i veien framstår like, som autovern og veioppmerking. Et kjent problem er å skille hvit veioppmerking fra snø.
Hvis man bruker fargebilder kan de kodes i forskjellige fargerom som gjør at enkelte farger kan fremstå som mer tydelige enn andre.
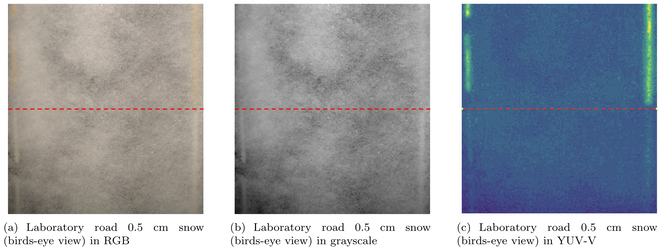
I NTNUs vinterlab så Storsæter på hvordan kamera oppfatter gul og hvit veimerking.
– Det virker intuitivt at gul oppmerking er mer synlig enn hvit når det er snø for oss mennesker, sier hun.
I et gråtonebilde vil gul og hvit oppmerking fremstå som grå og hvit, forklarer hun. Vegbanen vil ofte være grå og snøen vil være i hvit og gråtoner. Det gjør det veldig krevende å finne veioppmerkingen.
I noen fargerom, derimot, blir den gule fargen spesielt synlig mot både snøen og veibanen. Det kan være spesielt nyttig ettersom automatiserte systemer har færre holdepunkter å navigere etter når det er snø (se bilde for eksempel).
– Norden går vekk fra gul veimerking. Norge er snart eneste land med gule senterlinjer. Bakgrunnen er kostbesparelse. Det er dyrere å ha to farger og dobbelt opp med utstyr. Men for automatiserte kjøretøy kan gul oppmerking være viktig, sier Storsæter.
4) Kan gi billigere veimerking
Andre tilpasninger kan gjøre veimerkingen billigere.
Vegvesenet bruker en dyr og avansert perlende maling med innebygget retrorefleksjon (at lyset sendes rett tilbake mot lyskilden, slik som på reflekser) på veiene. Storsæter har funnet ut at retrorefleksjon er mindre avgjørende for den automatiserte bilen.
I stedet er kontrasten viktig. Det er også en fordel at malingen er litt tykk og har en god kant. Da blir kantene eller overgangene som bilens programvare leter etter lettere å identifisere. Asfalten bør gjerne være mørk.
– Det kan potensielt gi billigere maling. Samtidig er det viktig å være nøye med hvordan den påføres og alltid ta vekk den gamle malingen, sier Storsæter.
5) Et steg frem for mennesket, et steg tilbake for maskinen
LED-baserte skilt er gjerne sett på som et fremskritt for menneskelige sjåfører, ettersom de også er synlige i mørket.
For et kamerabasert system er imidlertid LED-skiltene en utfordring, ettersom flimringen fra lysene kan påvirke kameraets oppfatning av skiltinformasjon.

Reaksjonstiden er viktig
Veiutformingen må også tilpasses det automatiserte systemets reaksjonstid, understreker Storsæter. Det er en vanlig oppfattelse at datamaskiner har raskere reaksjonstid enn mennesker. Dersom det stemmer kan man tillate høyere fartsgrenser.
Storsæter minner om at maskinen skal prosessere store mengder data fra sensorene, noe som krever kraftige prosessorer med mye minne og gode metoder for å kaste unna data som ikke er viktig.
Det er med andre ord ikke gitt at den automatiserte bilen reagerer raskere enn mennesket.
Bilprodusentene bruker ulike sensorer
En av utfordringene ved å utforme veien for automatiserte kjøretøy er at bilprodusentene har valgt ulike teknologier. Mens Volvo og flere andre kombinerer kamera, radar og lidar, satser Tesla kun på kamera.
Kameraer er ikke kjempegode til å kalkulere avstand, ettersom dette må beregnes ut fra piksler i bilder, forklarer Storsæter. Før dette kan skje, må også objektene være riktig identifisert. For et kamera kan det være vanskelig å vite om piksler representerer objekter man må unngå eller ikke – om det er en skygge, en plastpose eller en stein som ligger i veibanen.
Kameraene vil heller ikke kunne registrere overflateteksturen på samme måte som lidar og radar. Samtidig sier Storsæter at kameraene blir den viktigste sensoren å ta hensyn til fremover, ettersom den er billig og brukes av alle.
– Vegvesenet må jobbe sammen med bilprodusentene for å lage veien så trygg som mulig, sier hun.
Små skritt
I framtiden trenger man ikke veioppmerking i det hele tatt – alt ligger digitalt eller i bilens kart, funderer Storsæter. Det er likevel en fjern drøm så lenge også mennesker kjører, påpeker hun.
Det finnes en klassifisering av infrastruktur for automatisert kjøring (Road Infrastructure Support Levels for Automated Driving, ISAD), hvor man på øverste nivå forventer at infrastrukturen skal kunne overvåke seg selv og hjelpe til med å koordinere trafikkflyten. Storsæter tror det gir mer mening å ha sensorer i bilen, og at vi i dag heller bør bruke penger på de mer nærliggende tingene, som farger og skiltutforming.
Endringene må uansett ikke gå på bekostning av den menneskelige føreren, påpeker hun.
Storsæter jobbet inntil nylig i Statens vegvesen, og Vegvesenet finansierte også forskningen hennes.
Erik Olsen, seksjonssjef for transportstyring i Vegvesenet, sier at doktorgraden er veldig relevant og interessant for dem i arbeidet med å utvikle et effektivt, miljøvennlig og trygt transportsystem.
– Arbeidet og tankene til Ane tar vi med inn i porteføljen vår av forskning og utviklingsprosjekter (FoU). Det er imidlertid lange prosesser fra FoU til implementering på vei, sier han.



