
”Trykkende” fakta
- Referansenøyaktigheten for en trykktransmitter bestemmes av IEC 60770, og inkluderer linearitet, hysterese og repeterbarhet.
- Temperaturendringer kan påvirke trykkmålinger, men mange målere har integrert kompensering for slike svingninger.
- Kalibrering av trykkmålere skal gjøres med utstyr som er typisk 3 ganger så nøyaktig.
- Endring av måleområde er ikke det samme som rekalibrering.
- Tidsfaktorer som demping, step respons-tid, dødtid, ”rise time”, tidskonstant og responstid forteller hvordan trykktransmitteren reagerer ved påtrykte endringer.
- Yttergrensene for en sensors måleområde, hvor oppgitt nøyaktighet er garantert, er definert mellom nedre (LRL) og øvre målegrense (URL).
- Måleområdet, mellom nedre måleverdi (LRV) og øvre måleverdi (URV) bestemmes av brukeren, og ligger innenfor sensorstørrelsen (ovenfor).
- Måleområdet er ofte mindre enn sensorstørrelsen. Ved såkalt ”Turndown” – innenfor oppgitte grenser – kan transmitteren tilpasses aktuelt måleområde.
Forfatteren
Automatiserings artikkelserie «Tett på trykk» er utviklet i tett samarbeid med Endress+Hausers Rita Refvik, ansvarlig for trykk- og temperaturmålinger i Skandinavia. Hun stiller med omfattende instrumenteringserfaring. Etter mange år i kjemisk treforedling med praktisk erfaring har hun nå etter 11 år på leverandørsiden også god innsikt i problemstillinger og løsninger i andre bransjer.
Av: Rita Refvik, Endress+Hauser
.png)

For trykkmåling, så vel som hos andre måleprinsipper, er det en jungel av begreper å forholde seg til.
Referansenøyaktighet
Mange av disse er vanskelige å tolke, og gjør at en god forståelse av yteevnen til en spesifikk transmitter kan være en utfordring. Denne artikkelen byr på en forklaring av de vesentligste punktene i en trykktransmitters datablad.
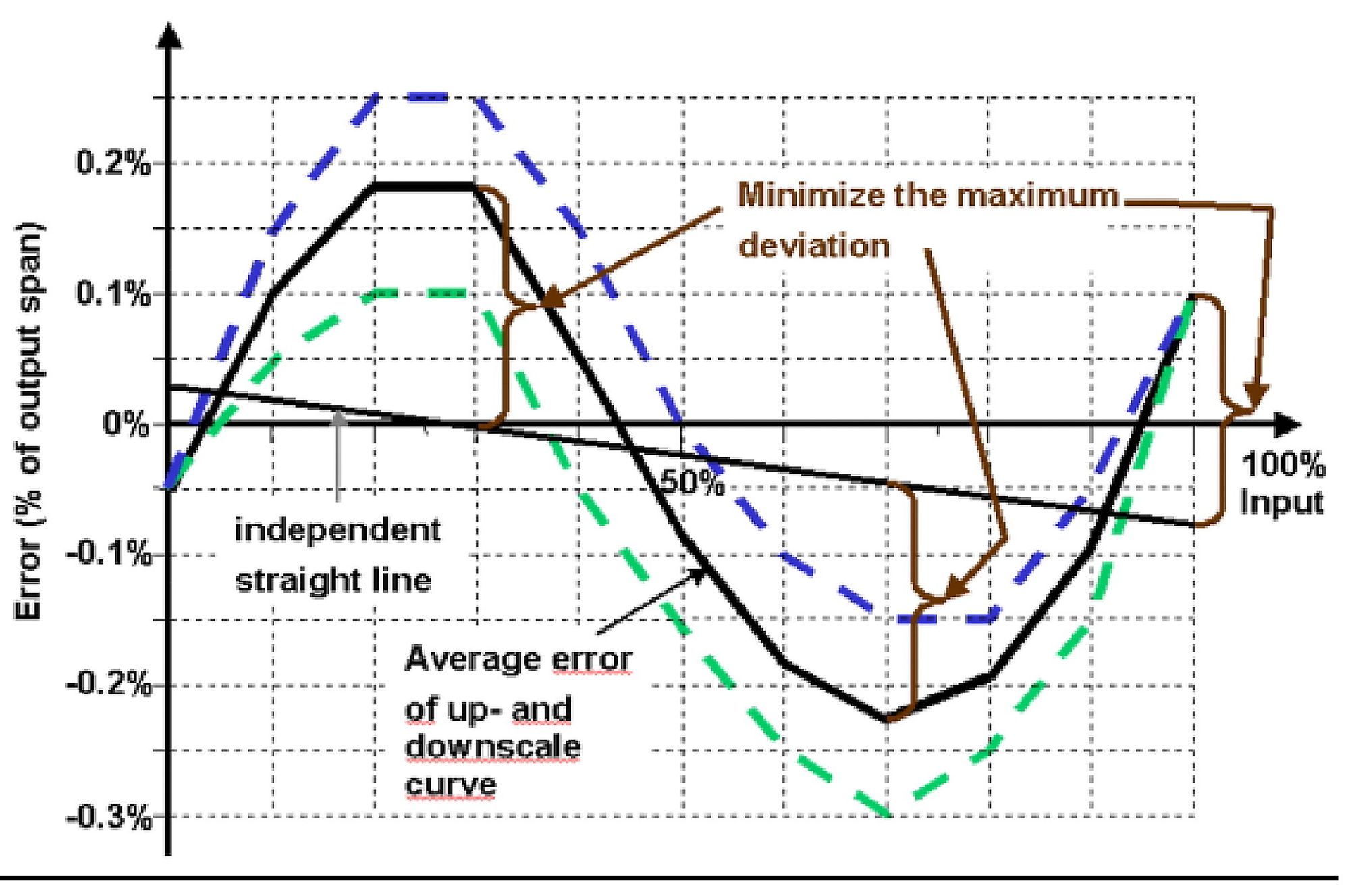
La oss starte med referansenøyaktigheten. I følge IEC 60770, internasjonal standard for transmittere for bruk i industrielle kontrollsystemer, del 1: I metoder for evaluering av ytelse skal referansenøyaktigheten (typisk 0,05 til 0,2%, avhengig av type instrument) innbefatte måleområdets:
- Linearitet: et uttrykk for i hvilken grad instrumentet måler et trykk helt lineært, eller proporsjonalt med, den virkelige verdi. Avviket kan beregnes på flere måter. Den vanligste er en såkalt uavhengig linearitet, som gir den beste tilpasning uavhengig av avviket ved nedre og øvre måleområde.
- Hysterese: beskriver den maksimale forskjellen instrumentet måler på det samme inngangssignalet ved definerte steg i fullt opp- og nedadstigende trykkområde.
- Repeterbarhet: uttrykker samsvaret mellom flere etterfølgende målinger på den samme inngangsverdien, under helt like forhold.
Temperaturpåvirkning?
Det er også viktig å vite at temperatur har en effekt på nøyaktigheten. En temperaturendring vil påvirke egenskapene til sensormaterialene, og vil derfor påvirke målerens respons.
Trykktransmittere er normalt kompensert for denne temperatureffekten, men i visse tilfeller vil vi likevel måtte regne med avvik pga. dette. Faktoren for dette er temperaturkoeffisienten, og den uttrykkes som en prosentvis endring av ”zero” og ”span” verdiene (forklaring lenger nede).
Denne effekten kommer særlig til uttrykk i et ”diaphragm seal” system (tilleggssystem bestående av en ekstra membran og oljefylling. Dette brukes av flere årsaker, blant annet som ekstra beskyttelse, ved meget høye temperaturer eller lignende, mer om dette i senere utgaver).

%2520propulsion%2520pic%25206.jpg)
Avhengig av den enkelte type oljes termiske egenskaper, vil temperaturendringer endre oljens volum. Volumendringen vil gi en nullpunktsendring på måleområdet, men denne endringen kan kompenseres, og er således enkel å håndtere dersom temperaturen er stabil.
Kalibrering
Langtidsstabiliteten er nyttig for brukeren å vite, for å kunne beregne hyppigheten av rekalibrering. Langtidsstabilitet er en beskrivelse av størrelsen på transmitterens drift over en langtidsperiode, gjerne 1, 5 eller 10 år.
Kalibreringen gjøres for å kontrollere at transmitterens nøyaktighet er innefor den spesifiserte verdien. Transmitteren påtrykkes de ønskede trykkene i steg (typisk 0, 25, 50, 75 og 100 %) fra 0 – 100%, og ned igjen, fra en kalibreringsenhet med nøyaktighet typisk tre (3) ganger bedre enn transmitterens.
Ferdig justert måleområde?
De målte verdiene noteres og sammenlignes med de faktiske. Dersom transmitteren opprinnelig ikke er bestilt med et spesielt måleområde, leveres den kalibrert i forhold til full sensorstørrelse. Men dersom transmitteren er levert ferdig justert (et gitt måleområde), er den kalibrert i henhold til dette. Dersom en senere rekalibrering viser at transmitteren ikke har samme nøyaktighet som opprinnelig, kan en avviksjustering forestas.
Å endre et måleområde, omtales ofte feilaktig som en rekalibrering, selv av leverandørene. Analoge transmittere må riktignok påtrykkes det trykket de skal ha før 0 og 100% kan justeres.
Men dette trykket kan godt være gitt via tilkobling til prosess, dersom man vet at man kan oppnå 0 og 100% av måleområdet her, for eksempel ved en (hydrostatisk) nivåmåling. Endring av måleområdet, på digitale transmittere, kan gjøres uten trykkpåsetting.
Tidsfaktorer
Da har vi kommet til forskjellige tidsuttrykk som demping, step responstid, dødtid, ”rise time”, tidskonstant og responstid. Forvirrende kanskje, men la oss ta dem steg for steg:
Demping er en forsinkelse (filtrering) av utgangssignalet i forhold til målt trykkendring. Denne kan brukes der man har et veldig urolig prosesstrykk, og man ikke ønsker å formidle dette til styresystemet.
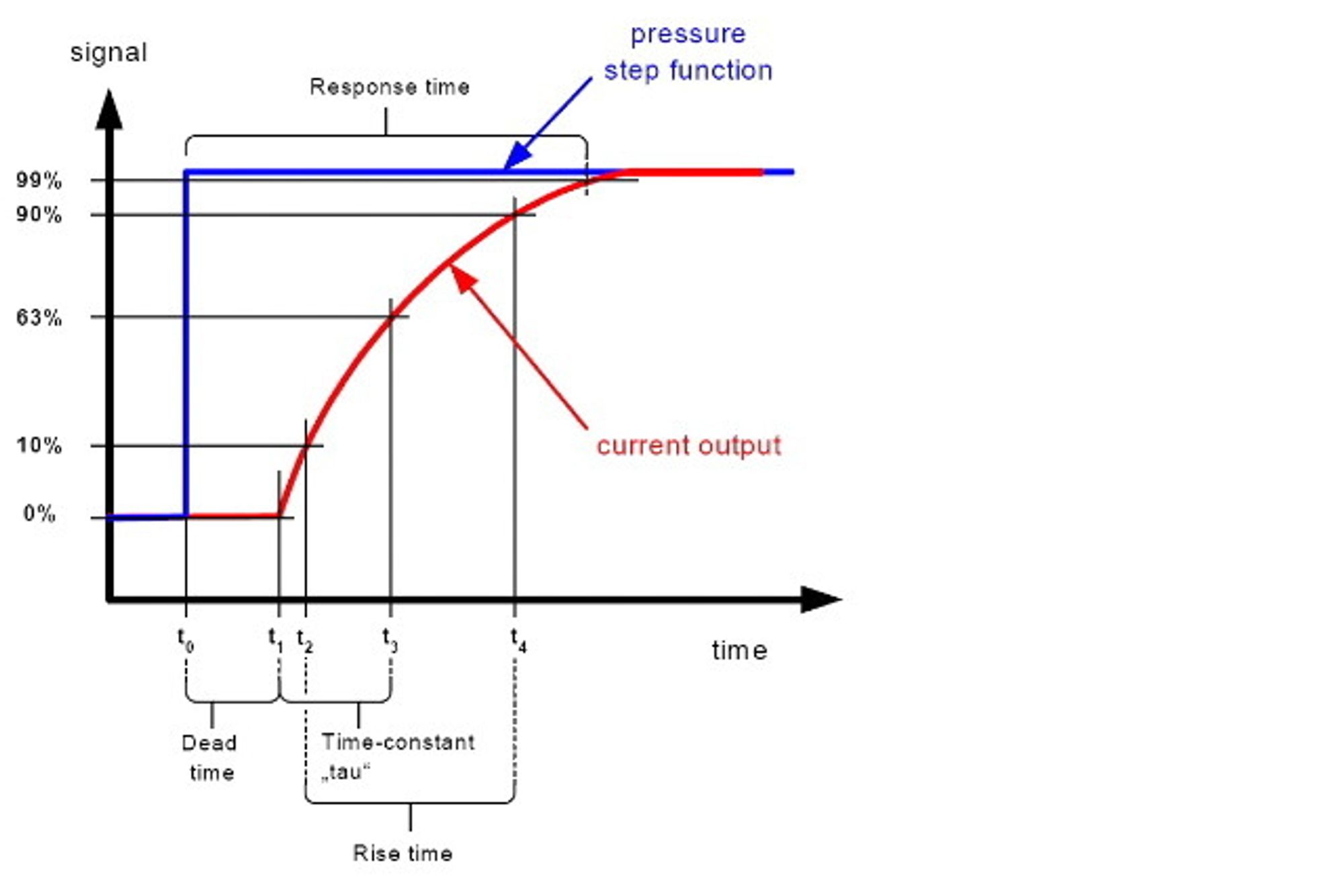
De andre tidsuttykkene har alle en sammenheng med reaksjonstiden på en endring av prosesstrykket: Når trykket i prosessen endrer seg, vil det ta en viss tid for transmitteren å reagere på denne endringen; denne prosessen kalles ”step respons”. Dette kan deles inn i flere; dødtiden er den tiden det tar før transmitteren starter å måle endringen og ”rise time” er den tiden det tar å måle fra 10 til 90% av trykkendringen.
Responstiden er interessant når man trenger raske målinger, og er den tiden transmitteren bruker før utgangssignalet reflekterer 99% av trykkendringen.
Tidskonstanten, Tau, er for øvrig betegnelsen på tiden det tar for å måle fra 0 til 63% av trykkendringen.
Sensorstørrelse og måleområde
Til sist, i denne omgang, skal vi se litt på definisjoner rundt sensorstørrelse og måleområde. For å gi best mulig nøyaktighet, tilpasset alle typer applikasjoner, leveres trykktransmittere med forskjellige sensorstørrelser.
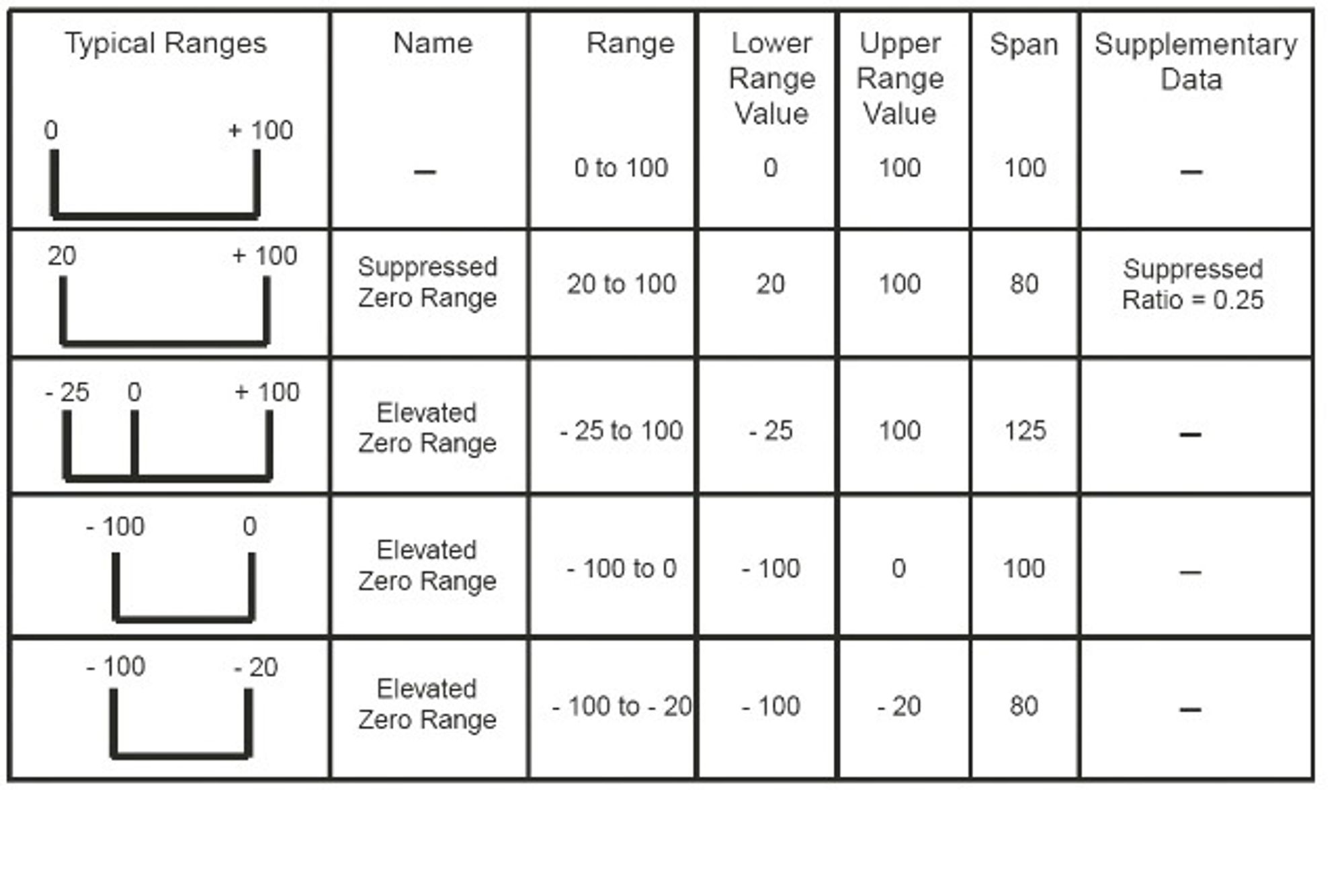
Yttergrensene, for en sensors måleområde, kalles LRL = ”Low Range Limit” (nedre målegrense) og URL = ”Upper Range Limit” (øvre målegrense). Transmitterens oppgitte nøyaktighet er garantert innenfor disse grensene.
Måleområdet derimot; LRV = ”Lower Range Value” (nedre måleverdi) og URV = ”Upper Range Value” (øvre måleverdi) bestemmes av brukeren, men må ligge innenfor ”LRL” og ”URL”. Måleverdien er altså mindre, eller lik, målegrensene.
”Span” er den algebraiske forskjellen mellom disse punktene, mens ”Range” uttrykker det samme i intervallform. Eksempel: Span = 8 bar, Range/måleområde = 2 til 10 bar. Oftest sammenfaller disse uttrykkene da 0% gjerne er 0 bar.
En sensor tåler likevel større påkjenning. Det maksimale trykket en sensor tåler, uten å ødelegges og tillater at transmitteren fortsatt virker helt tilfredsstillende når overtrykket fjernes, uttrykkes som MWP = ”Max Working Pressure”.
I mange applikasjoner vil måleområdet være et annet enn sensorstørrelsen. Da vil det være nødvendig å redusere måleområdet. Vi har da foretatt en såkalt ”Turndown”. En transmitters maksimale ”Turndown” er oppgitt i transmitterens spesifikasjoner, og er et uttrykk for det minste måleområdet som kan settes på en transmitter.
En 10 bars sensor som settes til et måleområde på 0…2bar har for eksempel en ”Turndown” på 10 : 2 = 5.
Av og til er det også nødvendig å plassere transmitteren under det punktet som defineres som nullpunktet, for eksempel på et rør under en tank eller høydebasseng ved nivåmåling. Også ved fylt lavtrykksrør, ved nivåmåling i lukket tank eller ved plassering av en dP transmitter (differansetrykk) med kapillærrør mellom de to trykkuttakene, vil det være behov for en nullpunktsjustering. Dette defineres som ”Zero Elevation” (hevet nullpunkt) og ”Zero Supression” (undertrykt nullpunkt).



