Forbedrer leverandørene
Roboter er både ”dumme” og ”blinde”. Derfor stiller robotisering ofte større krav til kvaliteten på arbeidsstykkene eller objektene som håndteres. Slingringsmonnet er mindre enn ved manuelt arbeid. Det må kanskje stilles høyere krav til kvaliteten på materialer fra underleverandører og/eller egen mottakskontroll. Ingen kjede er sterkere enn det svakeste ledd….
Dersom kravene til arbeidsstykkene er et tema, kan selvsagt roboten bidra med kvalitetskontroll, for eksempel ved at vision systemer og/eller laser benyttes for måling/kontroll av objektene. Men, dette har en kostnadsside (trolig med rask tilbakebetaling), og syklustiden kan hemmes.
Robotene Ruler
Automatisering artikkelserie ”Robotene Ruler” er leverandøruavhengig og utviklet i tett samarbeid med Trond Teigen hos Skala Robotech. Han hadde en lang karriere i databransjen før han i 1997 ”omskolerte” seg til automatiseringsbransjen, med roboter som spesialitet. Dagens arbeidsgiver er distributør for Motoman roboter, og leverer blant annet robotsystemer for sveising, palletering, maskinbetjening og montasje.
Også en ”robottrio” fra TI Automotive i Kongsvinger, Thomas Dahlen, Ronny Olsson og Rolf Östher, har bidratt med viktig informasjon samt kvalitetssikring av innholdet.
Serien er et grunnkurs i fornuftig tilnærming til teknologien. Den dekker hva som kan robotiseres, hvorfor, hvordan, suksessfaktorer og noen fallgruver. Vi går ikke ned på programmeringsnivået, da hver leverandør har sine verktøy.
Kreativt mellom ørene
Med unntak av veldig små objekter og/eller svært raske syklustider, er det ifølge vår hovedkilde, Trond Teigen, ansvarlig for opplæring og support hos Optimove, bare fantasien som setter begrensinger:
- Det som sitter mellom ørene av kreativitet er avgjørende!
Slik sett kan robotisering sammenlignes med et av våre andre automatiseringshjertebarn, optiske inspeksjonsløsninger eller vision systemer. Og riktig spennende kan det bli når teknologiene samspiller, dvs. kamera(er) brukes til robotstyring, for eksempel posisjonering eller plukking av usorterte objekter.
Les mer om maskinsyn i vår Vision Skole:
Del 2: ABC for Vision Systemer
Del 3: Bildebehandling - magi?
Del 4: Integrasjon og robot-vision
.png)
.jpg)
Bruksområder
Hvilke oppgaver kan det være aktuelt å overlate til våre mekaniske hjelpere? Listen nedenfor er lang, men slett ikke uttømmende. Spektrumet er stort, fra mekanisk bearbeiding til en rekke håndteringsoppgaver:
- Sveising. For eksempel standard ”MIG-sveising”, ”TIG” (med eller uten kaldtrådmatning, som smelter sammen med metallet i arbeidsstykkene), ”CMT” (Cold Metal Transfer, for ekstremt tynne plater, ned til 3/10 mm), og boltsveising.
- Boring, fresing, sliping, nibling, forsenking osv.
- Saging, skjærebrenning og vannskjæring.
- Liming.
- Lakkering. Av alt fra maling/lakk til spraying av ulike belegg, for eksempel flytende teflon på hvitevarer.
- Håndtering av arbeidsstykker for CNC-maskiner; henting og plassering av deler, samt fjerning og plassering av ferdigbehandlede objekter. Eksempler er å sette inn/fjerne deler i dreiebenk og rørbøyemaskiner.
- Betjening av maskiner, eks. kantpresse.
- Pakking. Hente produkter fra bane og pakke i esker. Også henting av flatpakkede esker, som brettes ut, flytting til bunnlimestasjon, oppfylling av esken, før den til slutt flyttes til en topplimestasjon. Vakuumgripere kan være aktuelt.
- Palletering, inklusiv forflytting av deler. Med fleksible gripere eller verktøyveksler (for ulike gripere) kan for flere produkter palletteres. Også her kan vakuumgripere være en god løsning, som kan håndtere opptil flere hundre kilo i hvert løft.
Les også:
Robotsamspill



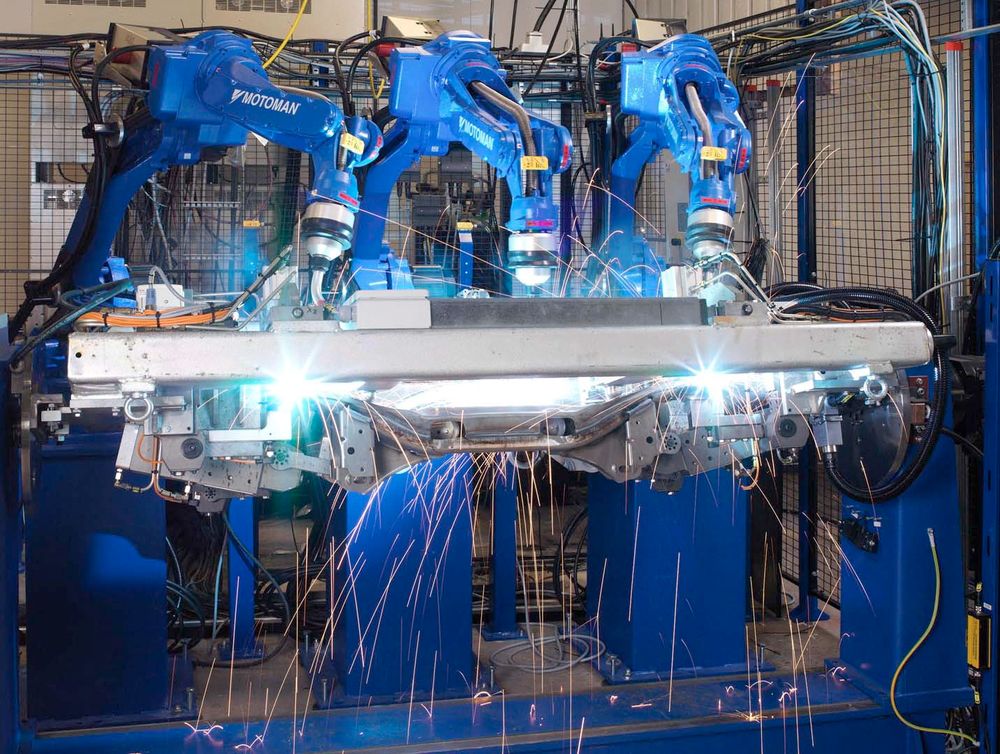
I alle bearbeidingsoppgaver ovenfor, som sveising, boring, fresing, sliping saging, liming og lakkering, kan to eller flere roboter utføre oppgaven i fellesskap. En eller flere roboter kan hente og holde, eller bevege arbeidsstykket, mens andre (roboter) i cellen utfører oppgavene. Når jobben er gjort, flytter ”holde/bevegelsesroboten(e)” delen til neste arbeidsstasjon til videre transport. Fiksturer er overflødige, og bearbeidingen kan gjerne gjøres raskere og/eller bedre. Et eksempel er to roboter som holder hvert sitt arbeidsstykke, og en tredje sveiser dem (arbeidsstykkene) sammen. De fleste robotleverandører tilbyr software for ulike typer robotsamhandling.
Robotsamspill
Utover listen, med aktuelle funksjoner, kan robotene utføre mange oppgaver i samarbeid med både annet utstyr og tobente operatører:
- Automatisk posisjonering. Vision-styring for posisjonering av roboten, for automatisk henting av arbeidsstykker.
- Automatisk plukking. Tilsvarende konseptet ovenfor, men gjerne mer utfordrende, automatisk plukking av usorterte objekter, i for eksempel en kasse. Vi har også sett applikasjoner hvor en kombinasjon av vision og laser benyttes.
- Operatørstyring. Roboten betjenes av operatør med en eller annen form for fjernkontroll, for håndtering av for eksempel varme eller giftige objekter. Slik samspill mellom maskiner og mennesker er trolig et område i vekst.
Les også de neste artiklene i serien:


