
Praktisk Prosessregulering
Artikkelserien ”Praktisk Prosessregulering” er utviklet av Dr. ing. Morten Christian Svensson i samarbeid med Automatisering. Det praktiske står i fokus, framfor en teoretisk, matematisk tilnærming.
Av Dr. ing. Morten Christian Svensson
”Sløyfe-brillene” er da ofte motsatte krummete kurver, akkurat som på virkelige briller. I denne artikkelen ser vi på forskjellige måter å korrigere ”nærsynte” (les ulineære) reguleringssløyfer, slik at disse tilfredsstiller gitte reguleringskrav.
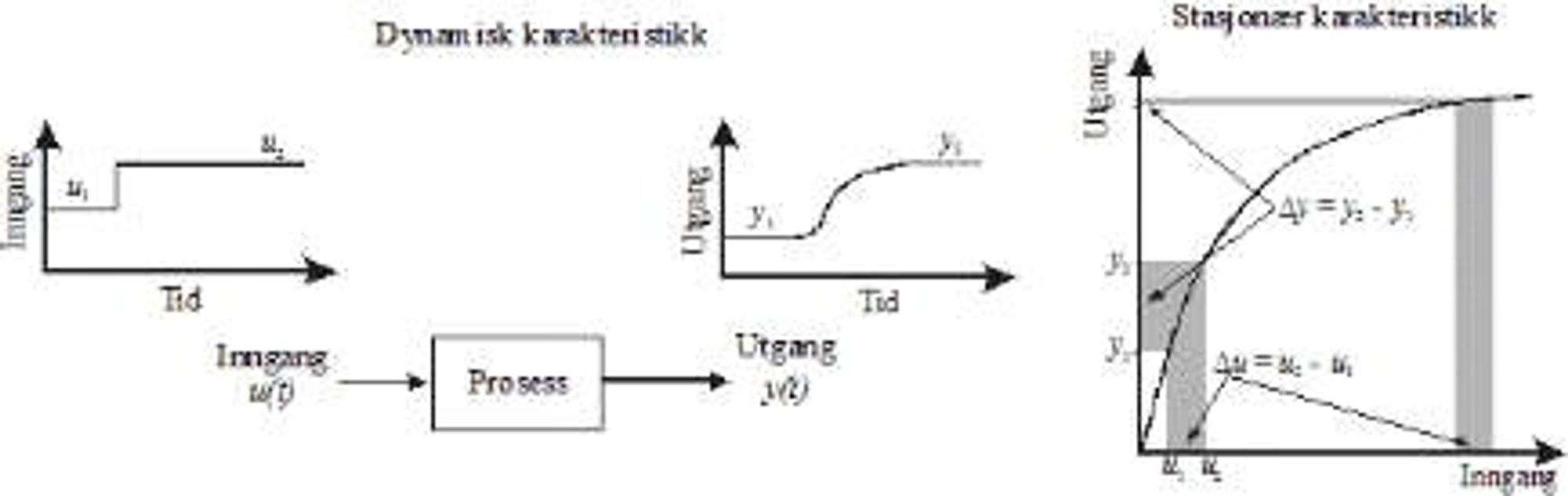
Prosesskarakteristikker benyttes til å beskrive prosesser. Vi skiller mellom dynamiske og stasjonære. De førstnevnte tas ofte opp i et valgt driftspunkt og beskriver dynamikken til prosessen i området rundt dette. Disse karakteristikkene benyttes ofte til regulatortuning etc.
Stasjonære karakteristikker behandles sjeldent i tradisjonell reguleringsteknikk. Men, de ligger ofte til grunn for den praktiske tenkingen innen prosessregulering slik vi ser den realisert i prosessindustrien. Figuren viser sammenhengen mellom en dynamisk og en stasjonær karakteristikk. Den stasjonære karakteristikken viser den grafiske sammenhengen mellom prosessens inn- og utgang.
Prosessforsterkningen er gitt av helningen på den stasjonære karakteristikken, og vi kan ved å betrakte denne si noe om hvor ulineær prosessen er. Dersom helning er konstant (rett linje), er prosessen lineær. Stasjonærkarakteristikken, vist i figuren, er typisk for temperaturregulering i varmevekslere, og også her benyttes en likeprosentlig ventilkarakteristikk for å rette opp den totale karakteristikken, slik at denne blir rettest mulig.
Løsningsalternativer
Da de fleste reguleringssløyfer er mer eller mindre ulineære, må vi på et eller annet vis forholde oss til dette. Noen sløyfer er også viktigere enn andre, og krever spesielle tiltak. Følgende løsningsalternativer kan være aktuelle:
- Robust tuning av regulatorer, dvs. hvor godt de tåler endringer i prosessens dynamikk. Å tune robust krever ofte en annen måte å tenke på enn ved tradisjonell tuning. Den stasjonære karakteristikken gir deg ofte informasjon om hvor du kan forvente deg reguleringsproblemer, og ut fra dette kan du definere ”worst case” og ”slow case” når du tuner.
- Foreta en redesign av prosessen. Ofte skyldes reguleringsproblemet en feildesignet prosess, og et klassisk eksempel på dette er feil valg av ventilkarakteristikk. Det beste er ofte å foreta en enkel redesign (endre ventilkarakteristikk) for å bedre reguleringen. I stedet for å bruke briller, kan du i dag få laserkorrigert synet, altså ”redesignet” øyet slik at du ser bra uten briller.
- Kompensering av prosessens ulinearitet ved hjelp av motsatt ulinearitet. Eksempler her er valg av likeprosentlig ventilkarakteristikk for å kompensere for friksjonstrykkfall i rør. Se artikkelen ”Vriene ventiler”. Her er det samspillet mellom øyet og brilleglasset som gir godt syn. Har du prøvd briller med feil styrke?
- Bruk av ulineær PID-regulator. Parameterstyring er mest brukt her, og bør absolutt beherskes av de som arbeider med prosessregulering.
- Avansert regulering. Dette bør være siste utvei, men erfaring viser at prisen sjelden står i forhold til resultatet, og at disse systemene ofte havner i manuell etter en tid.
Ulineær PID-regulator
Dagens PID-regulator har mange muligheter for å korrigere for uønsket prosessulinearitet. Den mest brukte er trolig parameterstyring, der regulatorens parametere styres, tabell- eller ligningsbasert, via en styrevariabel. Utfordringen er ofte å velge riktig styrevariabel, noe som krever at du kjenner årsaken til ulineariteten, og hvordan denne ”måles”. Du kan også velge å bruke en ulineær PID-regulator for å løse spesielle reguleringsproblem. Eksempler her er gap-regulator, ”error-squared” regulator etc. Det er her ofte reguleringsavviket som behandles via en ulineær transformasjon.

Ulineariteter som hjelpere
Når vi kjenner årsaken til prosessens ulinearitet, kan vi også kompensere for dette ved å velge en motsatt ulinearitet i reguleringssløyfe.
Fra Bernoullis ligning vet vi at det er en kvadratisk sammenheng mellom trykkdifferanse og volumstrøm. I sjeldne tilfeller er denne ulineariteten ønskelig (for eksempel surge-regulering i kompressorer), men som oftest ønsker vi å fjerne den. Dette gjøres enklest ved å ta kvadratroten av signalet fra DP-cellen. I dagens digitale systemer kan dette enten gjøres i selve måleinstrumentet eller i regulatoren. I noen tilfeller må du benytte frittstående enheter.
I det mer generelle tilfellet må vi speile den stasjonære prosesskarakteristikk i en egen lineariseringsblokk.



