



– Vi har mange ideer, men er helt avhengig av ingeniørhjelp, fastslår Peter Klungsøyr. Senioroverlegen ved ortopedisk avdeling er opphavet til satsingen, siden det startet med at han ønsket å teste ut ideer han hadde for å forbedre resultatet av skulderoperasjoner. Det handler om rørlighet i skulderleddet, om hvor stramme leddbånd kan være før det fører til redusert bevegelighet, eller i motsatt fall økt risiko for å få en ustabil skulder ut av ledd.
I 2014 var en gruppe på fire ortopeder fra Ålesund en uke ved Smith and Nephews lab i York i England, i forbindelse med en pilotstudie for å teste ut om ideene var teknisk gjennomførbare. I 2015 ble den første artikkelen publisert på bakgrunn av denne studien, i tidsskriftet Journal of Experimental Orthopaedics. Senere er det publisert ytterligere to forskningsartikler i anerkjente medisinske tidsskrifter fra ledd-lab-miljøet i Ålesund.
.png)
.jpg)
Vil bli nordisk senter
– Vi kunne ikke gå i gang og teste ut teoriene på levende mennesker. Det var mye snakk om å finne en lab som kunne utføre de biomekaniske testene. Etter studien i York kom vi i kontakt med Universitetet i Hannover, som er det største miljøet i Europa av ingeniører som jobber med biomekanikk på et medisinsk universitet. Vi fortsatte testingen der. Det er ikke mange som gjør dette. Vail i USA gjør det samme. For vår del stod det mellom å samarbeide med en av de to. Hannover ble mest praktisk med beliggenhet i Europa, sier Klungsøyr.
Nå har de bygget opp sitt eget ledd-laboratorium i Ålesund basert på kunnskapen de har samlet. Miljøet har ambisjoner om å utvikle ledd-laboratoriet til et norsk og nordisk senter for biomekaniske robotforsøk. Til nå har de konsentrert seg om skulder, men teknologien kan brukes til forsøk på andre ledd i kroppen.
NTNU i Ålesund på sin side er i gang med et prosjekt for å utvikle en simulator for virtuell kirurgi, der kirurger kan trene på operasjoner virtuelt før operasjon på selve pasienten. Tanken er at simuleringsteknologien skal kunne nyttes innen medisinsk forskning. Samarbeidet har sitt utspring fra det eksisterende maritime simulatormiljøet som satte ortopedene i kontakt med forskere ved NTNU.
Da vi var på besøk for å studere ledd-laben, hadde de akkurat flyttet tilbake fra lokaler hos NTNU til et lokale i tilknytning til patologisk avdeling ved sykehuset. Dette på grunn av redusert tilgang til NTNU som følge av koronarestriksjoner. Men tilknytningen til den patologiske avdelingen er også praktisk siden de forsker på kadaver, det vil si ekte kroppsdeler fra mennesker. Disse kommer fra personer som har donert kroppen til forskning. Ifølge Klungsøyr kommer kroppsdelene fra USA.
Forskningsprosjektet har arbeidstittelen «Fremre skulderinstabilitet behandlet med subskapulær slyngeteknikk». Selve inngrepet utføres med kikkhullsmetode. Denne metoden gjør inngrepet langt enklere og mindre smertefullt for pasienten, og rehabiliteringstiden blir kortere. Ifølge Peter Klungsøyr er de nå i gang med å bruke erfaringene fra studien i virkelige skulderoperasjoner.
Tilpasset industrirobot
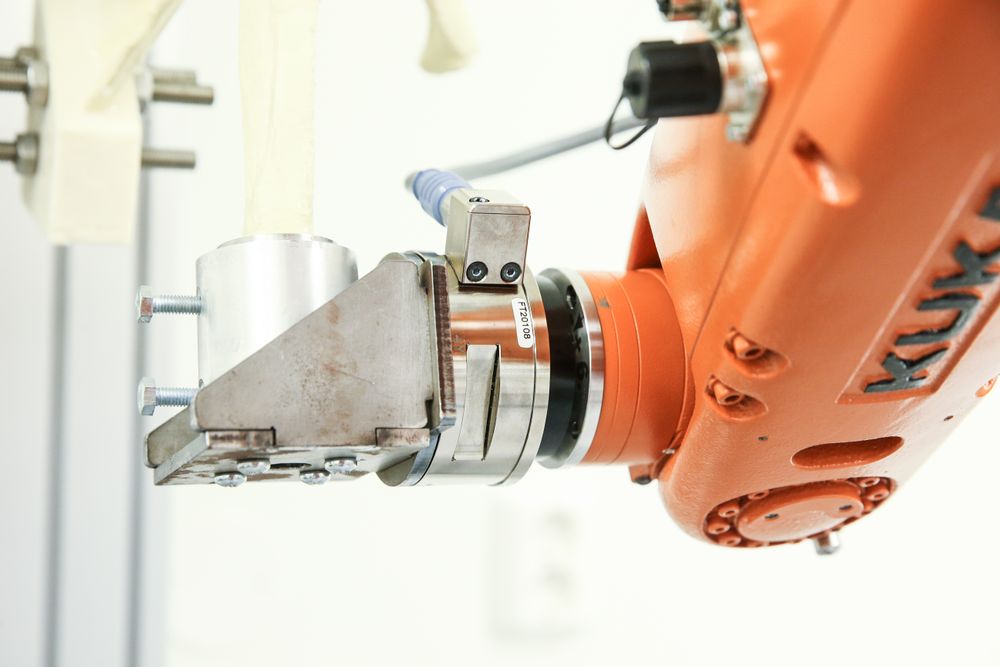
– Roboten brukes til å bestemme biomekanisk stabilitet i skulderleddet. Dette gjøres ved å påføre en kraft langs to akser, horisontalt og vertikalt, og samtidig måle hvor langt leddkulen flytter seg. Denne testen gjøres fire ganger. Første test gjør vi på intakte og «friske» kadaver for å bestemme utgangspunktet, deretter tester vi kadaveret etter at kirurgene har påførte en skade. De resterende testene gjennomføres etter at kirurgene har korrigert skaden ved to ulike operasjonsmetoder. Det gir oss et datagrunnlag til å vurdere nye og eksisterende kirurgiske metoder opp mot hverandre, forklarer ingeniør Aleksander Skrede.
Han har en bachelor i automasjon og en master i simulering og visualisering. Nå tar han doktorgrad i robotikk ved NTNU. Så langt har prosjektet fire PhD-stipender, flere er på vei inn.
– Det er en vanlig industrirobot vi har tilpasset til forsøkene. For å måle kraftutslaget har vi koblet på en sensor på endestykket til roboten, sier Skrede.
Integrasjonen, altså programvaren eller kontrollsystemet mellom kraftsensoren og roboten, er utviklet lokalt.
Andreas Fagerhaug Dalen, lege i spesialisering på ortopedisk avdeling og daglig leder av ledd-laben, håper vi bare har sett starten. Selv forbereder han nå en PhD. Så langt har de hatt et budsjett på 12-15 millioner kroner. Da er lønn til de ansatte i helseforetaket holdt utenfor.
– Vi håper å bygge opp miljøet videre og få inn flere stipender. Et langsiktig mål er at vi skal bygge opp miljøet slik at vi kan støtte opp under planene om å gi sykehuset status som universitetssykehus. Det er ambisiøst, men vi må våge å tenke stort. For å nå målsettingen, er vi avhengig av at ingeniører fatter interesse for det vi driver med, sier Dalen.
– Vi opplever nå at andre medisinske miljøer i Norge tar kontakt med oss og vil samarbeide.
Andre sentrale personer i ledd-laben er Terje Vagstad og Jan Arild Klungsøyr, overleger ved ortopedisk avdeling, og Robin T. Bye og Webjørn Rekdalsbakken fra NTNU i Ålesund.


Simulatorteknologi
Peter Klungsøyr har stor tro på fremtiden for ledd-laboratoriet, spesielt tror han et tverrfaglig samarbeid med skipssimulatormiljøet er en vei å gå.
– På samme måte som Ålesund har vært fremst i simulering offshore, har vi visjoner om å klare det innen vårt felt. For å få til simulering, må man få til vevsfølelsen, hvordan vevet oppfører seg under arbeid. Dette arbeider ingeniørene på NTNU med nå. Når man så skal registrere på vev, kan vi bruke vår lab. Mange ortopediske simulatorer er blitt utviklet, men til nå ingen gode, ingen som gir den rette vevsfølelsen når du arbeider. Erfaringene fra simulatormiljøet kan føre til at man kommer lenger og nærmere det naturlige enn man har gjort før, tror Klungsøyr.
– Vårt mål er å skape et levedyktig miljø som også kan ta på seg oppdragsforskning for andre institusjoner og firma. Forskning de ellers må til USA eller Hannover for å få gjort. De andre nordiske miljøene mangler et slikt testmiljø.
Klungsøyr tror også ledd-laben kan være et mulig utgangspunkt for knoppskyting. I et lokalmiljø på Sunnmøre der gründerkulturen står sterkt, tror han det kan være mulig å skape industri med utspring i aktiviteten.


