De fleste kommersielle droner er kvadrokoptere, eller har et annet antall rotorer som gjør at de kan lande og ta av de aller fleste steder.
Ulempen er at kvadrokoptere bruker en del energi på å fly. Det gjør at det ikke er praktisk å fly dem over lange avstander, og at de ikke egner seg like godt til å frakte last som en drone med faste vinger.
Samtidig kreves det steder å lande og ta av dersom man skal bruke faste vinger.
En kombinasjon – altså en drone som har faste vinger, og samtidig evnen til å lande og ta av overalt – hadde vært det ideelle.
Forskere ved universitetet i Sherbrooke i Canada har nå utviklet noe som kan løse dette, skriver IEEE Spectrum.
- Vind opp mot 15 knop: Her utføres den første droneinspeksjonen offshore
Inspirert av fugler
De har tatt inspirasjon fra hvordan fugler kan lande stort sett overalt. Fugler benytter vingenes løft under flukt, men under landing bruker de vingene til å skape skyvekraft oppover for å redusere hastigheten.
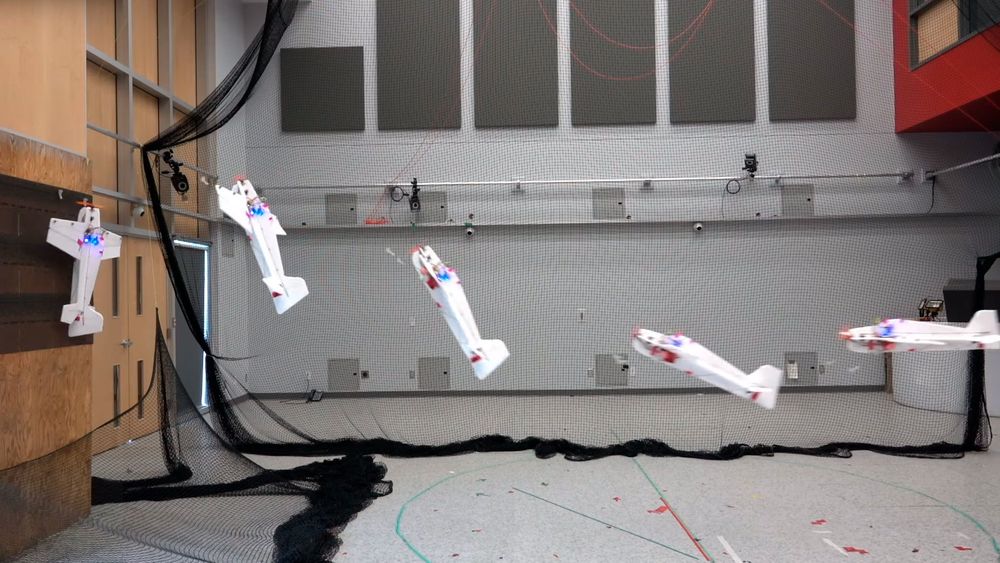
De har brukt dette prinsippet, og utviklet en fastvinget drone, eller et fly om du vil, som kan lande vertikalt på vegger og andre overflater. Dronen kalles S-MAD (Sherbrooke's Multimodal Autonomous Drone).
S-MAD har én propell i front, og holder seg i luften ved hjelp av løft over vingene, akkurat som andre fly. Når det skal lande, flyr det mot veggen, og peker nesen oppover mens det sakker farten. Når det så treffer veggen, griper klør, kalt «microspines», fast i underlaget.
.png)
.jpg)
Når flyet nærmer seg en vegg, vil avstandsmålere brukes til å vurdere når operasjonene skal uføres. Det vil da peke nesen oppover og redusere hastigheten.
Når et fly peker nesen opp og reduserer hastigheten, vil det til syvende og sist steile. Altså vil det miste løft, og falle. Forskerne har løst dette ved å bruke propellen til å holde flyet vertikalt, samtidig som vingene har nok kontrollflate til å motstå rotasjonskreftene.
- Sikrere trafikk: Nå kommer europeiske regler for droner
Kontrollert landing
Programvaren sørger for at «innflyvningen» skjer så kontrollert som mulig, slik at det flyet ikke treffer for hardt og spretter ut igjen, og sakte nok til at det kan gripe overflaten.
Når flyet har landet, er det også mulig å justere posisjonen, i tilfelle det ikke er posisjonert optimalt.
Når flyet så skal ta av gir propellen igjen løft slik at det kan bevege seg vekk fra overflaten, før det går over i horisontal posisjon og kommer opp i hastighet slik at vingene kan gi løft.
Slike droner har flere fordeler utover at de kan holde seg i lufta lengre perioder. Ved å lande på en vegg kan de fortsatt utføre overvåkning fra luften om det er hensikten. Da kan de være lengre i høyden, uten å bruke strøm til fremdrift, og flytte seg fra sted til sted ved behov.

- Rett til selvforsvar: Pentagon gir grønt lys til å skyte ned droner
Mange fordeler

Det finnes allerede kvadrokopterdroner som kan feste seg til vegger, som den Stanford-utviklede dronen «SCAMP», som vi har omtalt tidligere.
Alexis Lussier Desbiens, en av utviklerne bak S-MAD, sier til IEEE Spectrum at deres fastvingedrone har fordelen av å være spesielt effektiv under flukt, og at den kan bevege seg mye raskere mellom landingssteder.
Testing viser ifølge Desbiens at dronen lander pålitelig i laboratoriet, men at flere tester gjenstår utendørs i ulike værforhold.
Desbiens forklarer at denne typen drone kan gjøre helt nye droneoperasjoner mulig. De kan sendes ut og utføre et oppdrag i flere uker. De kan utstyres med ulike sensorer som for å gjøre bygningsinspeksjoner og annet.
Gruppen bak S-MAD presenterte resultatene sine i artikkelen «Autonomous Thrust-Assisted Perching of a Fixed-Wing UAV on Vertical Surfaces» under en konferanse for bio-inspirert robotikk ved Standford-universitetet i juli.
- Les flere artikler om droner.


