I løpet av 2017 begynner testene – først uten passasjerer.
Fra 2018 er planen å begynne fast kryssing med passasjerer, under forutsetning av at Sjøfartsdirektoratet utsteder sertifikat til det som da kan bli verdens første autonome passasjerferge.
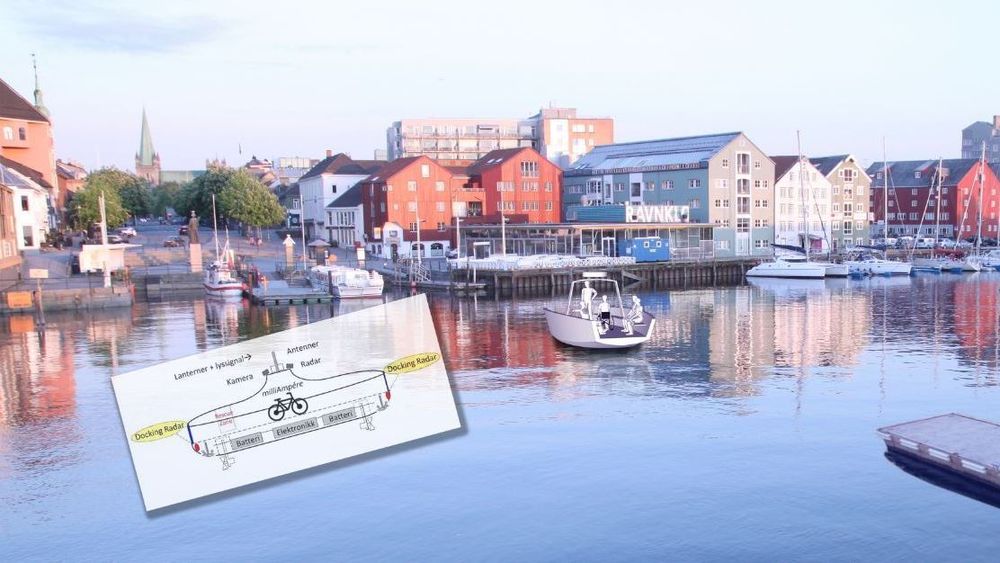
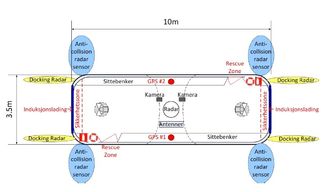
Fergen skal kunne ta med inntil 12 personer og ha plass til både syklister og mennesker i rullestol.

Passasjergrunnlaget er voksende. Vestre Kanalkai er et utbyggingsområde.
Heve- eller klaffebru er alternativet til ferge. Men kostnadene er 10 ganger høyere og kan være en risiko for småbåter i kanalstrømmen.
- Batterifiskebåten Karoline: Har gått et helt år uten driftsavbrudd
Prototyp
Det er NTNU som har satt i gang prosjektet. Penger til et pilotprosjekt er bevilget og byggingen av en 5 meter lang prototyp i skala 1:2 settes i gang i løpet av vinteren. En fullskalaferge blir 10 meter lang og 3,5 meter bred.

Dette skal testes og utvikles:
- Framdriftssystem – batterier – lading
- Navigasjonssystem – automatisk dokking
- Antikollisjonssensorer og systemer
Prosjektet er et samarbeid mellom NTNU AMOS (senter for autonome operasjoner og systemer) og instituttene for elektronikk og telekommunikasjon, kybernetikk og marin teknikk. Studenter og veiledere er med fra alle institutter.
Trille av-på
– Vi har studenter og veiledere fra institutt for marinteknikk som utvikler skroget nå, sier førsteamanuensis Egil Eide ved NTNU, institutt for elektronikk og telekommunikasjon.
Skroget kommer til å bli noe utradisjonelt, ifølge Eide. Overfarten blir på ett minutt og syklister og rullestoler skal kunne trille rett om bord.
– Det blir tilpasset overfarten i en kanal og skal ta hensyn til stabilitet og sikkerhet. Ikke minst er opplevd sikkerhet avgjørende for at folk skal føle seg trygge, sier Eide.
- Norge er verdensledende på autonome fartøy: Nå skal vi gjøre det til en milliardindustri
Autonome Trondheim
Utviklingen av autonome skip går med stormskritt. Trondheimsmiljøet med utspring i kybernetikk og elektronikk ved NTNU ligger langt framme. Trondheimsfjorden er blitt offisielt testområde.


Den lille kanal-fergen skal imidlertid testes i smulere farvann. Trondheim havn har satt av et område der ferga og andre autonome modellfartøy kan testes.
De største utfordringene er å utvikle antikollisjonssystemer. Ikke minst blir deteksjon av kajakker, små båter og andre uforutsette farer viktig. Og når deteksjon og identifikasjon er gjort, må fartøyet respondere riktig.
– Det er lite plass for unnamanøvrering, så mest sannsynlig må fergen stanse og vente for å unngå kollisjon, sier Eide.
- Autonome fartøy: – Det vi trodde skulle skje om 10-15 år skjer allerede nå
Sensorer og radarer
NTNU-teamene ser på ulike sensorer og instrumentering og annet utstyr som må plasseres om bord. I vinter og ut over våren skal ulike radarer og deteksjonssystemer stå og overvåke og logge all trafikk og bevegelser i kanalen.

Prosjektet vil teste både LIDAR (Light Detection And Ranging – optisk måling med laser), IR-kameraer (infrarød) og andre aktuelle sensorer og måleteknikker.
– Resultater av dette vil komme alle autonome prosjekter til gode, sier Eide.
- Første skritt mot autonome skip: Fjord1-ferge på autopilot
Dokking
En gruppe studenter og veiledere er godt i gang med å utvikle styresystemet som skal ta fergen trygt og mykt inn - til og ut fra kai (dokking). Det blir som en form for dynamisk posisjonering. Ved kai skal den elektriske ferga lades via induksjon.
NTNU-prosjektet har en solid smørbrødliste med systemer, instrumenter og utstyr de ønsker å utvikle og teste ut for det autonome fartøyet.
– Vi instrumenter kraftig opp i starten. Så får vi heller sa hva som er nødvendig, skrelle av og forenkle når vi ser hva som er nødvendig å ha om bord, sier Eide.
For enkelhets skyld kan det også hende at prosjektet finner det mest hensiktsmessig å ha det meste av utstyret stående på land og kommunisere via radiolink ut til fartøyet.
- Forbereder seg på oljevirksomhet i Arktis: Her flytter russerne et isfjell på 1 million tonn
Ingen rom for feiling
Eide påpeker viktigheten av å få til en løsning som gir god sikkerhet og driftsstabilitet,
– Fergen må være pålitelig. Vi må ha kontroll på hvem som er om bord og ser for oss en adgnagskontroll via app på telefonen, for eksempel, sier Eide.
Fergen må ha redundante systemer, være robust og kreve minimalt vedlikehold og det må utvikles en beredskapsordning som kan steppe inn hvis det blir problemer.
Tønsberg i startgropa
Også Tønsberg kommune snuser på muligheten av å benytte en autonom ferge. Det blir i så fall «Ole IV» som skal gå ut til Husøy fra Husvik.
NHO har et leverandørutviklingsprogram som gir støtte til kommuner som går til innovative anskaffelser.
Tønsberg skal legge strekningen ut på anbud.
– Det kan bli snakk om en elektrisk ferge som er forberedt for autonom drift etter hvert, sier Eide.
- Elbiler 2017: Neste år trenger du ikke kjøpe Tesla for å kjøre langt