Er det en egenskap i mobiltelefonen vi setter mer pris på enn noe annet vil nok mange si kameraet. Eller kameraene, for det blir stadig flere av dem. Det første ble lansert i Japan i 1999, men det tok mange år før det ble skikk på dem. Det skjedde, om vi er veldig snille i bedømmingen, for rundt ti år siden. Da begynte markedet for digitale kompaktkameraer å få problemer etter ti år med kanonvekst. I dag er de så å si borte, og selv systemkameraer får nå tøff konkurranse og synkende markedsandeler. De beste mobilene i dag har kameraer som får stadig flere til å mene at dette får klare seg.
Dette er et resultat av en nesten utrolig utvikling av bildesensoren i kombinasjon med mikroskopisk optikk med mange linser og ikke minst programvare som er bedre og bedre egnet til å fjerne svakheter som skyldes det begrensede lyset som treffer de knøttsmå pikslene.
For 20 år siden trodde man ikke det var mulig å få informasjon med et akseptabelt signal-støyforhold med noe særlig mindre piksler enn under 6 til 7 mikrometer. I dag er vi nede i 0,8 µm og i fremtiden enda mindre. Med god hjelp av bedre materialer, teknologiutvikling og ikke minst smart programvare.
Større krav til dynamikken i bildet
Det som er bra i mobiler er ikke nødvendigvis bra i alle andre anvendelser. I overvåkningskamera og biler – spesielt autonome biler – stilles helt andre krav til dynamikken i bildet.
Selv om mange moderne mobilkameraer tar bilder i HDR (High Dynamic Range) er det helt andre egenskaper vi snakker om her. I biler trengs det kameraer som gjøre mer enn å tyne mer ut av pikslene med programvare. De må ha fysiske egenskaper som virkelig fanger opp nyansene selv om de kjører inne i mørke tunneler eller på øde landeveier senhøstes. Samtidig må de også kunne se nyanser i sollyset som kommer inn i tunnelåpningen, eller en motgående bil med skarpe lys. Her er det ikke snakk om enkeltbilder, men om videoinformasjon. Ikke noe mobilkamera klarer slike utfordringer.
Et typisk mobilkamera kan levere et signal i hver farge på 10 bit, det vil si 1024 nivåer. Fra et kamera i en bil kreves det en oppløsning på 20 bit per farge, eller 1 millioner nivåer. Det må til for å dekke den enorme dynamikken som kreves for høy sikkerhet.
Ikke nok med en piksel
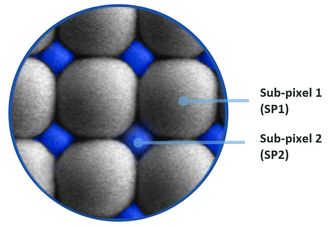
Et slikt område kan ikke dekkes av én type piksler. Derfor bruker man to subpiksler per bildepunkt. En med stort areal, som tar seg av det begrensede lyset i de mørke områdene, og en med lite areal som kan ta seg av de lyse. De minste er på linje med de vi nå finner i mange mobiler, som typisk er nede i en størrelse på 0,8 µm. Men selv så små sensorer kan blir overeksponert av blendende sollys. Derfor økes ladningskapasiteten på den minste sensoren ytterligere ved å integrere en ekstra kondensator for at den ikke skal «blendes».
De store subpikslene, som skal ta seg av de mørke områdene i bildet er på fra 1,5 til 3 µm. De er optimalisert for å gi god dynamikk i dette området fordi de slipper å ta seg av de lyse områdene.
Når man skal lese ut verdien i den store og lille sensorer går signalet gjennom en forsterker. Signaler fra den store sensoren som tar seg av det svake lyset forsterkes mye og fra den «lyse» lite.

Det som skjer i en fotodiode, det vil si et piksel, er at fotonene, altså de partiklene vi oppfatter som lys, har energi nok til å slå løs elektroner fra silisiummaterialet. En diode er en liten bit silisium med to ulike områder som er dopet med ulike materialer slik at de utgjør en positiv katode og en negativ anode. Elektronene som slås løs vil samle seg ved overgangen mellom de to. På anodesiden er det et overskudd av elektroner og på katodesiden et underskudd. Derfor kalles dette område for PN-overgangen (Positiv og Negativ).
Dioden fungerer som kondensator
Hvor mange fotoner som faller inn i pikselet er da ekvivalent med antallet elektroner som samler seg i anoden ved PN-overgangen. En diode er som kjent en komponent som leder strøm bare en vei. De kan gå fra positiv til negativ, men om de prøver å gå andre veien stopper de i PN-overgangen. Hvor mange fotoner som faller inn i pikselet er da ekvivalent med antallet elektroner som samler seg i anoden ved PN-overgangen. På denne måten fungerer dioden som en kondensator. Men for å få noe begrep om hvor mange elektroner det dreier seg om så må de tappes ut til en annen kondensator. En veldig liten en på rundt en femtofarad. Når de er på plass her kan de måles fordi i kondensatoren utgjør de en ladning; Q. Når ladningen deles på kapasitansen til kondensatoren, C; kan vi utlede spenningen: V = Q/C.
Men spenningen kan være null og oppover (avhengig av lysnivået) og for at dette skal gi mening må den digitaliseres. Spenningen føres til en AD omvandler via en aktiv (forsterker) transistor som er koblet til hvert eneste piksel. Da kan vi få en større verdi som kan sendes til ADen; en analog til digital omvandler som behandler spenningen som er et analogt tall, og vi trenger et digitalt. Dessverre finnes det ikke transistorforsterkere som ikke har en egenstøy. Den vil påvirke bildet kraftig hvis det er snakk om et svakt signal, det vil si lite lys. For å få nok spenning i dårlig lys må kondensatoren være så liten som mulig. Det burde jo løse problemet, men nei. Spenningsområdet på inngangen til transistorforsterkerne bør ikke være mer en 1 volt. Det blir den hvis kondensatoren skal være så liten den bør være.
Så hva gjør forskerne da?
De har flere triks i boka. For å få en bildedynamikk på 20 bit/farge, det vil si 120 dB, introduserer de to kondensatorer. En liten og en stor med hvert sitt operasjonsområde. Den lille kan ta imot fra null til rundt 1000 elektroner, mens den store kan ta fra null til 10.000 elektroner. Dette er en metode som gjør at sensorene kan veksle mellom kondensatorene for å få mest mulig oppløsning når det er veldig mørkt, uten å overbelaste forsterkeren når det kommer mer lys.

Denne metoden kalles Dual Conversion Gain og gir enorm sensitivitet i dårlig lys, samtidig med stor dynamikk ved mye lys. Mens en bilsensor i dag klarer 120 dB dynamisk område klarer et mobilkamera rundt 70 dB. Men ved å ty til ulike triks, som å ta flere bilder etter hverandre med ulik eksponering, kan de få såkalt HDR - High Dynamic Range, og oppnå over 90 dB. Det er nok sannsynlig at mobilkameraer i fremtiden vil hente teknologi som er bygget for bilkameraer. Da trenger de også bedre linser som støtter den høye dynamikken med mye mindre intern refleksjon (Flare). Det har de ikke i dag.
Bilindustrien vil ha mer
Men selv to slike superhøyoppløste subpiksler for å måle lyset i hvert punkt, og doble kondensatorer, er ikke nok. Bilindustrien vil ha 24 bit bildesensorer med 140 dB dynamikk, som vil si 16,7 millioner nivåer. Da må det mer innovasjon til, og her kommer det flere løsninger som ingen vil fortelle om ennå. Det er sannsynlig at sensorer som utvikles nå kommer på markedet neste år. Så mye dynamikk gjør at man kan holde eksponeringstiden konstant. Det er en fordel med tanke på håndtering av raske bevegelser i bildet, som det er mye av i trafikken. Da vil sikkerheten øke.
Kilde: Sjef for Sony Europe Automotive Design Centre på Lysaker, Johannes Sølhusvik, Ph.D.