DARPA ROBOTICS CHALLENGE
- The Virtual Robotics Challenge foregikk i juni 2013 og testet programvarelagenes evne til å styre en simulert robot gjennom tre oppgaver i et virtuelt mijø.
- Under The DRC Trials som foregår i desember 2013, skal lagene styre robotene gjennom åtte individuelle fysiske tester som tester bevegelighet, manipulasjon, smidighet, persepsjon, og kontrollmekanismer
- DRC-finalen vil foregå i slutten av 2014 og vil kreve at robotene prøver seg på en rekke sammenhengende fysiske oppgaver der robotene skal prestere mest mulig autonomt.
Tre konkurranseklasser
Darpa-konkurransen er delt inn tre klasser:
- Track A er den klassen i DRC som det knyttest høyest forventninger til. Det er unike roboter som alle har fått tilskudd av Darpa til å videreutvikle både maskinvaren og programvaren.
- Track B/C består av lag som har spesialisert seg innen programvareteknologi og skal vise sin verdighet innen koding ved hjelp av den bipedale roboten Atlas som har fått en finpuss ved hjelp av amerikanske myndigheter.
- Track D er en klasse av egenutviklede roboter som ikke har fått økonomiske tilskudd fra Darpa. Her skal både maskinvare og programvare testes.
Kilde: Darpa
Darpa Robotics Challenge Trials går nå av stabelen på Homestead-Miami Speedway.
Dette blir nest siste ledd i konkurransen om den beste rednings-roboten før den endelige finalen i 2014 tar plass, der vinneren stikker av med 2 millioner dollar.
.png)

Bevegelighet, fysisk manipulering av objekter, smidighet, persepsjon, og kontrollmekanismer er blant evnene som robotene skal testes i. Og kravene er ikke snaue.
DRC Trials 2013: Disse robotene skal kjempe for en tilværelse som superhelter
Robolympiske leker
Nå skal de seks gjenværende robotene i eliteklassen Track 1, som har overlevd de tidligere konkurransene, kjempe seg gjennom åtte svært krevende fysiske hindere.
Det fins også to andre klasser som skal løse de samme oppgavene, blant annet en der programvareutviklere skal manifistere seg gjennom den humanoide roboten Atlas (se faktaboks).
Det forventes i følge Darpa både snubling og fall, da robotene anslås å være på stadiet der de kan sammenlignes med ett år gamle barn.
Under DRC Trials er ikke robotene forventet å gjøre alle oppgavene i stand sammenhengende. Men i 2014, forventes finalistene å ha kommet på nivå med to år gamle barn og skal dermed ha lært seg å gjennomføre alle disse oppgavene sammenhengende med minimal menneskelig inngripen.
Her er de åtte øvelsene lagene må gjennom:
1. Fartøy (Vehicle)
Roboten skal først kjøre et terrengkjøretøy, en Polaris Ranger XP 900, gjennom banen, unngå alle hindringene og krysse målstreken. Deretter skal roboten komme seg ut av fartøyet og bevege seg for egen motor ut av målsonen.
Roboten vil ha muligheten til å ta i bruk girspaken for å skifte gir underveis, men dette er ikke en forutsetning for å bestå oppgaven. Som standard vil det høyeste giret være på for en mykere start.
Det er heller ikke obligatorisk at roboten setter på håndremsen, men det vil som Darpa understreker, være en fordel for å komme seg ut av fartøyet slik at roboten slipper å gå av i fart.
Blir barrierene forskjøvet av robot eller fartøy, vil resten av løpet bli avblåst og null poeng vil bli gitt for øvelsen.
Det samme skjer om alle fire hjulene på fartøyet går ut over de ytre grensene av banen.
Les også: Formel 1-bilene skal bruke 40 prosent mindre bensin

2. Terreng (Terrain)
Under terrengdelen, starter robotene bak den grønna linja vist i figuren nedenfor og skal gjennom tre hindringer.
Den skal stige over og forbi en første hindring som er 15 centimeter høy.
Deretter skal den over en midtre hindring som består av trappetrinn opp og trappetrinn ned. Den siste hindringen i terrengdelen har blokker som er stablet ujevnt både opp og ned.
Oppgaven er fullført når roboten har kommet seg over det siste hinderet og ikke berører noen av blokkene fra det siste hinderet.
Det vil likevel være forventet at roboten skal bære tilkoblet en kabel som berører hindrene uten at dette gir grunnlag for diskvalifikasjon.
Les også: Valkyrie skal kunne redde deg i en katastrofe

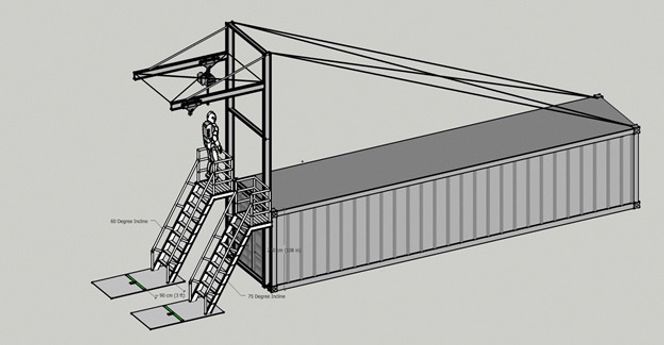
3. Stige (Ladder)
Stigeetappen går ut på at robotene skal klatre opp en stige med stigning på 2,4 meter. Lagene kan selv velge vinkelen på stigen til å være enten 60 eller 75 grader. Valgfritt er også rekkverk for håndstøtte.
Robotene trenger ikke klatre ned stigen for å bestå oppgaven.
Les også: Denne mekaniske villkatten løper raskere enn de fleste mennesker
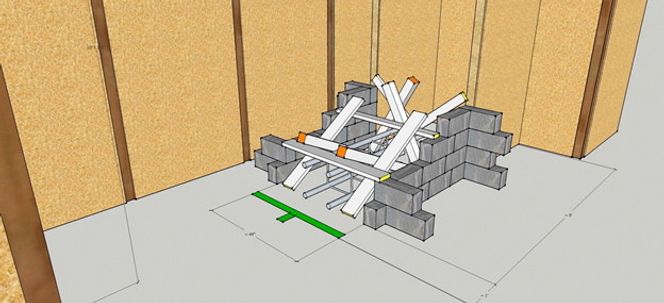
4. Fjerne avfall i veien (Debris)
Her skal robotene testes i å fjerne avfall og løse hindringer som ligger i veien framfor seg. Til sammen skal ti avfallsdeler flyttes utenfor feltet mellom startstreken og dørgangen. Deretter må den komme seg gjennom den åpne dørgangen for å få full uttelling.
Avfallsdelene er planker laget av balsatre og være i ulike størrelser.
Les også: Slik kan du bygge roboter uten koding
5. Dør (Door)
Her skal robotene vise sine egenskaper inne i bygninger ved å være i stand til å åpne ulike dører.
Den første døren dyttes utover. Roboten må gå inn i et trangt rom og åpne den andre døren denne gangen dras innover. Deretter må roboten bevege seg mot den siste døren som også dras innover. Denne døren har i tillegg en dørlukker med vekt som gjør motstanden tyngre enn på de første to dørene.
Alle dørene er utstyrt med dørvridere som roboten enten kan skyve opp eller ned for å åpne.
Les også: Her testes Norges nye super-drone

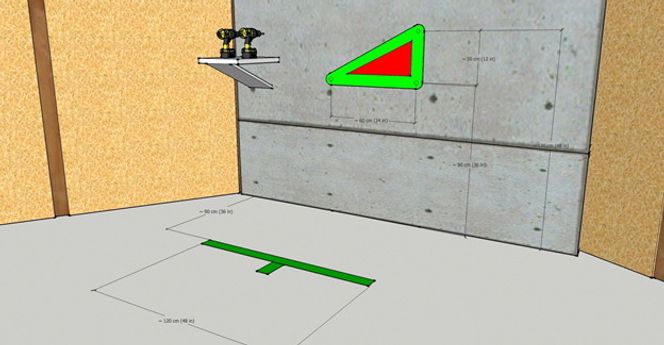
6. Vegg (Wall)
Utstyrt med en trådløs drill, skal robotene demonstrere motorisk presisjon ved å borre gjennom en veggplate for å fjerne en trekantet figur. De kan enten utstyre seg med en boremaskin av typen Dewalt DCD980M2 som har pistolgrep eller en Dewalt DC550 som har av/på-knapp.
Det skal kun bores innenfor det grønne feltet. Det røde feltet som vist på bildet under skal deretter kunne fjernes. Verken det grå området utenfor eller det røde innenfor skal det bores på.
Det er ingen øvre krav til hvor mange hull som kan borres inn i det grønne feltet, men det skal være minimum ett hull i hver av kantene.
Veggen er en tørrvegg med tykkelse på en halv tomme.
Når hullene er boret, kan roboten dytte tørrveggen så trekanten detter ut. Dersom det oppstår sprekker ut i det grå området, blir ikke oppgaven godkjent.
Les også: Humanoiden Asimo kan løpe som et menneske
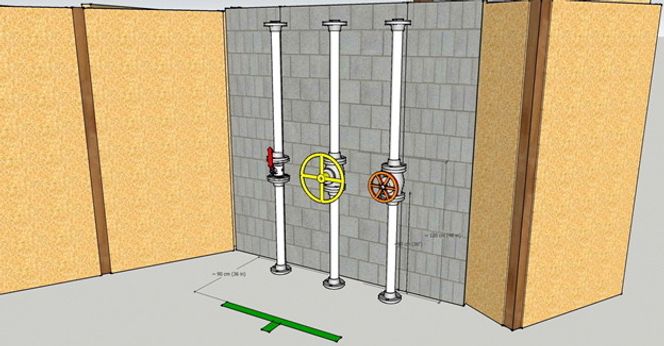
7. Stenge ventil (Valve)
Her skal robotenes ferdigheter med ulike ventiler settes på prøve. Oppgaven går i korte trekk ut på å vri tre ulike ventiler som er koblet til slanger med gjennomstrømming av luft. Oppgaven er ikke godkjent før luftstrømmene er stengt.
Kran 1 er en 90 graders kuleventil med et håndtak på 13 tommer.
Kran 2 er en stengeventil med en diameter på 9 tommer.
Kran 3 er en stengeventil med en diameter på 18 tommer.
Les også: Om ti år kan vi alle ha en robot-slave i huset
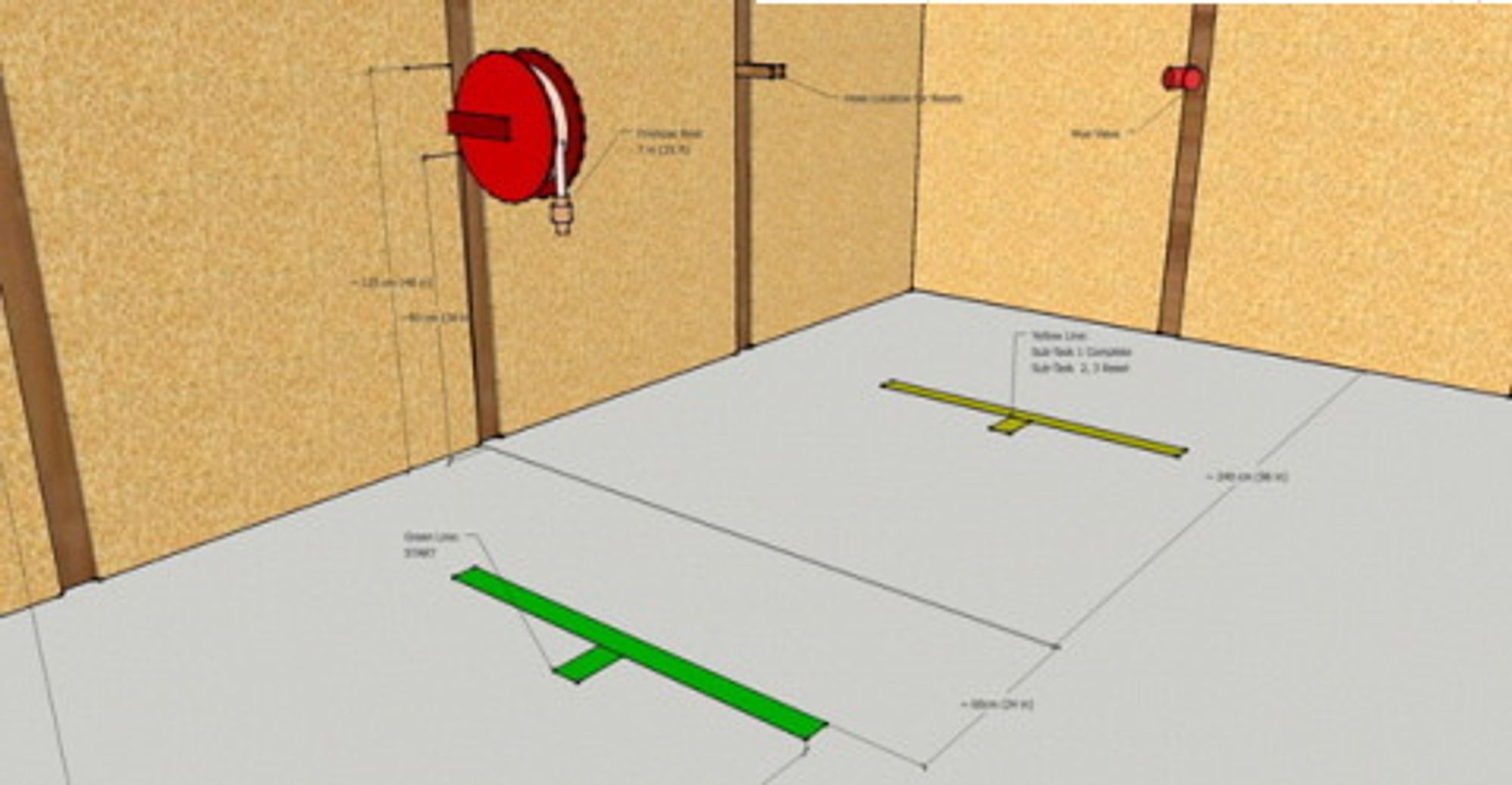
8. Slange (Hose)
Den siste øvelsen i Darpa Robotcs Challenge går ut på å betjene en slange og hekte den til et Y-rør.
Robotene må manøvrere seg til slangerullen, gripe tak i slangen og dra den over den gule streken som vist på bildet under. Deretter skal munnstykket kobles til Y-røret.
Oppgaven er godkjent så lenge slange-munnstykket berører Y-røret og sitter fast uten at roboten støtter opp.
Les også: Selvgående robot kan gjøre bonden rikere
Les også:
Packbot skal beskytte paven, OL og fotball-VM




