


Fakta
Prosessor: Intel XScale 400MHz
Skjerm: TFT LCD, non touch
OS: Windows CE 5.0, .NET Compact Framework
Programmeringsspråk for grensesnittutvikling: C#
Verktøy: Visual Studio 2005, Windows CE Platform Builder
Knapper: Knappefolie for meny
MMI: Klare ikoner velges med piltaster + Enter
Grensesnitt: Ethernet
Joysticks: Game-pad type
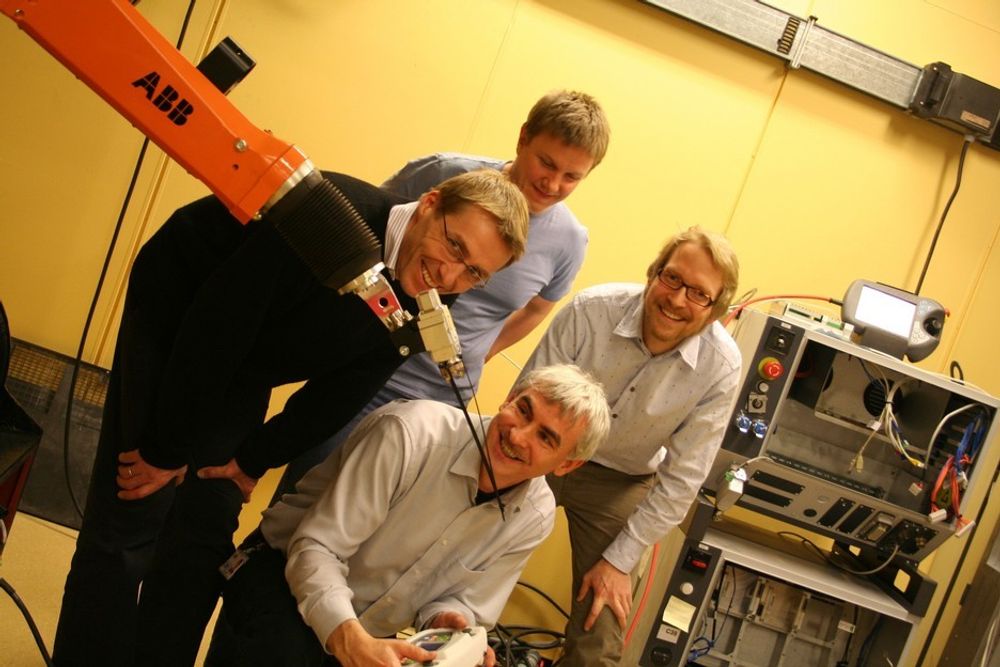
Etter timevis med seriøs research og masse moro med X-box og PlayStation kom utviklingsprosjektet i gang.
Spillkonsollenes ergonomiske kontroller og brukervennlige grensesnitt skulle overføres til robotstyringsenheten.
– Det spennende er at vi introduserer en løsning som er velkjent for PlayStation-generasjonen inn i et veldig konservativt industrielt miljø, sier Tormod Henne, utviklingsingeniør i ABB.
Overrasker brukerne
En TPU (Teach Pendant Unit) er en innretning koplet til roboter som gjør det mulig å bevege og programmere roboten interaktivt.
Tradisjonelt er disse store og avanserte. Spillkonsoll-TPU-en blir standard for ABBs roboter i løpet av 2006
Henne forteller at enkelte myser kraftig når de ser den nye styrings- og programmeringsenheten.
– Men de blir svært positivt overrasket når de prøver den. Enheten har et svært godt ergonomisk grep og et enkelt brukersnitt som minner om dagens spillkonsoller og mobiltelefoner. Vi har gjort utrolig avansert teknologi svært enkel å bruke.
Utfordringer
Fire utviklere har jobbet med prosjektet i tre år.
– Utfordringen ved å lage en liten og ergonomisk TPU har vært å tilfredsstille de strenge sikkerhetskravene som stilles til lakkeringsroboter, sier Knut Braut som har ledet prosjektet.
Han røper at de nå jobber med trådløse løsninger på innretningen, noe som gir enda større sikkerhetsutfordringer.


Blant annet må det ikke være mulig for en operatør å ta feil av hvilken enhet som skal brukes til den enkelte robot.
.



