
Målet er at robotene skal kunne endre form eller antall ben, reprodusere seg selv og tilpasse seg ekstreme forhold der mennesker ikke kan komme til. Hensikten er å bruke robotene i gruver eller i utilgjengelige sjakter, i skredfarlige områder på havbunnen under Antarktis eller til og med på fjerne planeter.
Robotene skal kunne bli utstyrt med egne 3D-printere som kan brukes til å reprodusere et ødelagt ben, endre robotenes fasong og tilpasse seg omgivelsene der de er slik at de kan løse oppgaver og utfordringer som melder seg etter hvert. Det kan for eksempel tenkes at den er ute på oppdrag og finner en hindring som ingen hadde regnet med. Da skal roboten kunne ta et bilde av hindringen, analysere den, for så å bruke 3D-printeren til å lage en ny robot eller et nytt element på den eksisterende roboten slik at den kan forsere hindringen.
Finner optimal form
Kyrre Glette har tro på at det er mulig å få dette til selv om det er mange utfordringer.
– Det at de faktisk kan gjøre slike ting på sparket, i felten, er kanskje teknisk mulig, men det er en ganske stor ingeniørjobb å få det til, å få alt «innenbords». Og så er det en utfordring med regnekraft per i dag, sier han.
Den anvendelsen som her er skissert er en fremtidsvisjon.
– Dette er først og fremst grunnforskning, men vi jobber med roboter som beveger seg, så det er jo mye ingeniørarbeid i det vi holder på med, forklarer han.
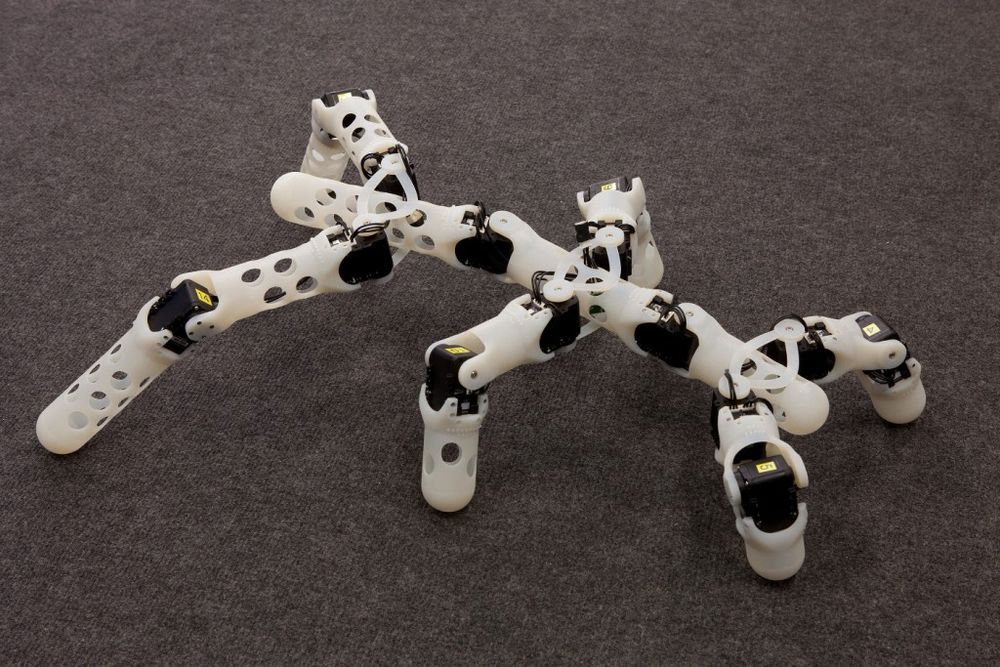
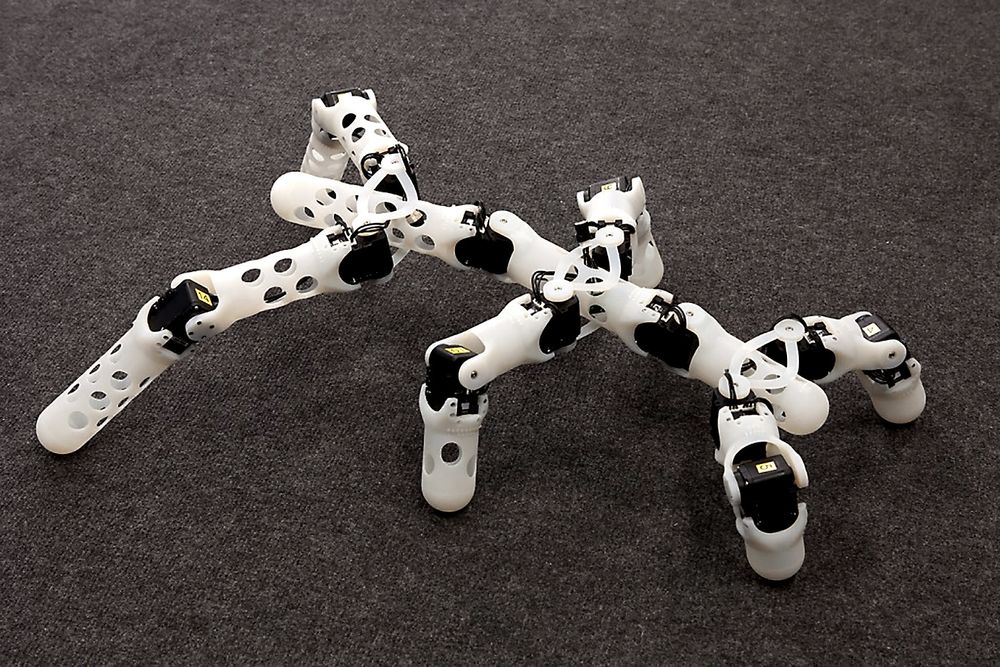
Robotene blir laget ved 3D-print. Etter at de er printet ut, kan ytelsen trenes opp og forbedres. Foreløpig kan robotene trenes opp til å øke ytelsen med opptil 40 prosent, men forskerne håper at ytelsene etter hvert kan fordobles. Under testingen av robotene legger forskerne ut hindringer, slik at robotene selv skal kunne lære seg hvordan hindrene kan passeres.


