

Robotene veier ikke mer enn noen få gram. Små roboter er ikke noe nytt, det nye er deres evne til å bevege seg og påvirke omgivelsene sine. En viktig fordel med disse små maskinen er føttene, som egentlig er små flate pad’er som på undersiden er forsynt med små gummihår. Dette gir robotene en gripeevne som er helt unik og som er andre mikroroboter ganske overlegen.
Noen av robotene er så små at forskerne måtte bygge dem under mikroskop og ved hjelp av pinsetter. Pad’enes unike gripeevne utnyttes når de trekker. Roboten tar ett skritt fram og låser pad’ene til underlaget idet den trekker lasten til seg, for igjen å rykke fram, ta nytt grep og trekke på nytt.
Les: Vestlendingene tar robotgrep
Mikro-taubåter
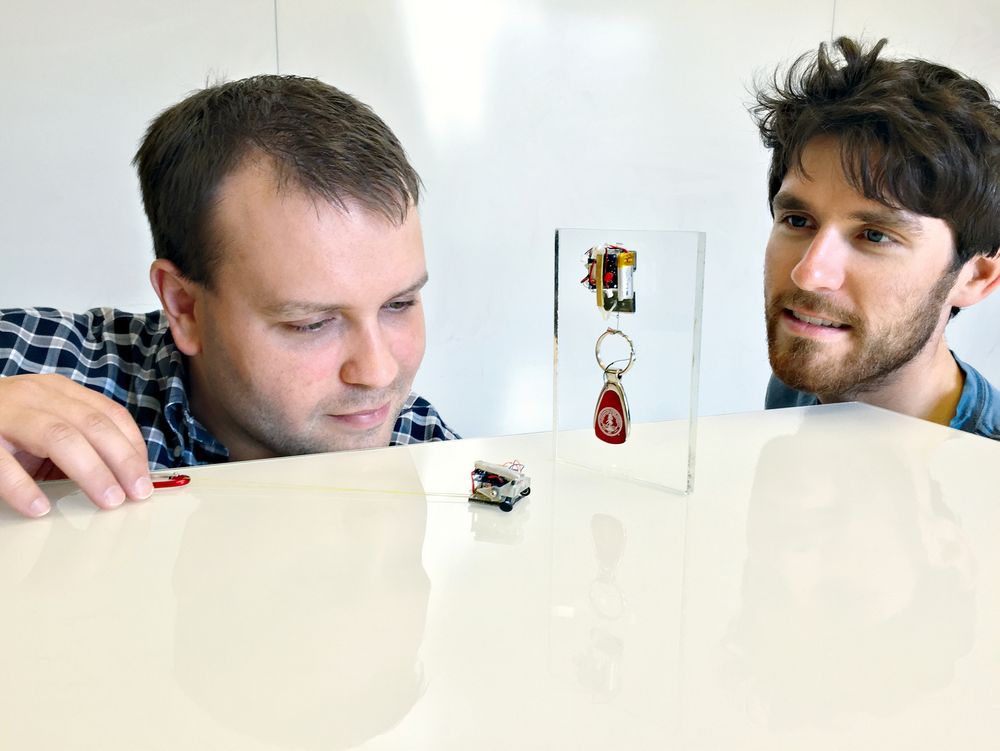
Det er laget forskjellige prototyper, men forskerne konsentrerer seg i første omgang om to hovedvarianter, en bakkebasert robot på 12 gram som kan trekke 40N (ca. 4kg) og en ni grams klatrevariant som kan klatre samtidig som den bærer en kraft på 10N (ca. 1 kg). Hvis et menneske skulle gjøre noe tilsvarende, så ville det innebære å trekke en blåhval etter seg eller klatre oppover en loddrett vegg med en elefant på ryggen.
En av dem som har vært med på arbeidet med å utvikle disse små kraftpluggene er David Christensen, som tar doktorgraden på prosjektet. Han forteller at de har latt seg inspirere av føttene til gekkoer.
De nyutviklete robotene har fått navnet Micro Tugs, som direkte oversatt betyr “mikro-taubåter”. Nyvinningen ble vist fram på den internasjonale konferansen Robotics and Automation i Seattle som åpnet 26. mai.
Se også: NFA setter pris på studentene

Løsning med klatreføtter
Christensen forteller at robotene er resultatet av fem års doktorgradsarbeid. I starten strevde han lenge med å finne ut hvordan han kunne gi mikroroboter mer kraft slik at de kunne utføre de teknikkene som ville ha vært svært nyttige.
Samtidig arbeidet han sammen med Elliot Hawkes som prøvde å utvikle klatremetoder for mennesker etter modell av gekkoenes føtter og innså at mye av dette kunne oppnås med aktiv elektronikk.
– Da vi innså at klebeføtter også kunne gi mer styrke til mikrorobotene, ble prosjektet virkelig spennende, forteller Christensen.
Et av problemene med mikrorobotenes styrke var nemlig at føttene lett glipper mot underlaget. De begynte å lage robotene i fjor og det tok omtrent fire måneder å lage prototyper som fungerte slik de skulle. Siden da har de jobbet med forsøkene og med vitenskapelige artikler.
Christensen forklarer at pad’ene til robotene har et gekko-inspirert klebringsmiddel som skrus av og på. På når roboten trekker og av i løpet av et tiendedels sekund etter at trekk-kraften er fjernet.
– Det er et ganske magisk stoff som bruker van der Waals kraft og hovedsakelig parallell aktivering og utkobling på gummikiler på 100 micron som ikke engang er synlige, forklarer han.
Les om: Robotene ut av buret

Mange bruksområder
Robotene drives av små batterier. Varigheten på batteriene avhenger av hva robotene brukes til, men han innrømmer at batterikapasiteten er en bekymring.

– Det vi lærte er at det i realiteten avhenger av aktuator-teknologien som vi bruker, forteller han.
Motorene har blitt målt til 20 prosent effektivitet på en avstand på fem meter med full kraft. Det mener han er ganske bra for noe som er så smått.
Når det gjelder nytteverdien av robotene i industrien, så forteller han at de arbeider for å få dem til å arbeide sammen i team for å fullføre større mål. I industrien ville det nok ifølge ham være noen store fordeler med å gjøre robotene større.
– Vi ser at en robot på størrelse med en robotstøvsuger av typen Roomba kunne dra rundt 500 kilo på en glatt overflate. Det ville være nok til å gjøre jobber innen shipping og i varehus, tror Christensen.
Siden kostnadene er lave, tror han de kan brukes innen vanlig forbruk. Likevel er det vanskelig å se rekkevidden av bruksområder siden det er snakk om helt nye muligheter.
– Jeg tror vi overlater det til folks fantasi å finne det perfekte bruksområdet for dem, sier han.
Professor Geir Hovland ved Institutt for Ingeniørvitenskap ved Universitetet i Agder forteller at det er flere forskere som nå arbeider med å utvikle roboter med klatre-egenskaper basert på studier av gekkoenes klatreføtter.
Han er likevel imponert over det David Christensen og hans kolleger har fått til ved Stanford.
– Det er jo imponerende at de kan løfte 10N (1kg). Kanskje dette kan anvendes til rengjøring av store vindusflater, tanker og den slags, undrer Hovland.'


