Satelittnavigasjonstjenester, eller GNSS, har blitt en viktig del av hverdagen vår.
Ikke bare fordi de gjør det mulig å finne frem uten å fikle med kart, men også fordi de har blitt en integrert del av infrastrukturen.
Satellittenes signaler gjør det ikke bare mulig å kalkulere posisjon. De brukes også til å synkronisere tid.


Kritisk for infrastruktur
Det gjør dem til en viktig del av kraftnettene, hvor synkronisering er viktig for å utføre operasjoner til riktig tid.
I telekommunikasjon synkroniseres nettverkene mot satellittene.
I finansverdenen synkroniseres transaksjoner i datasystemene mot GNSS.
Luftfart, jernbane og skipsfart er også i praksis avhengig av slike tjenester.
Tjenestene kan på sikt erstatte radar i luftfarten. I jernbanen brukes GNSS til å fastslå hvor tog befinner seg, og kan i fremtiden integreres med et kjøretøy-til-kjøretøy-system som gjør at biler kan vite om et tog er på vei før de kjører over en planovergang.
Tidssynkronisering er kritisk i alle distribuerte nettverk, for eksempel når seismisk aktivitet overvåkes.
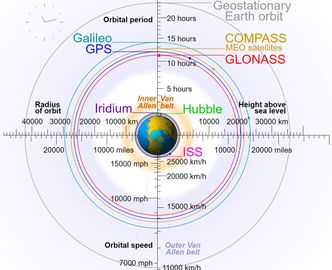
Det er i dag tre operative, verdensomspennende GNSS-tjenester: GPS, GLONASS og Galileo. Sistnevnte er fremdeles under utbygging.
Skulle en eller flere av disse settes ut av spill, vil det skape store utfordringer.
- Les også: Her passerer flere GPS-jammere hver dag
Feil i GNSS-systemer
Dette hendte sist i januar 2016, da GPS-tid-systemet ble satt ut av spill i 12 timer.

Det skjedde da det amerikanske luftforsvaret skulle ta en av satellittene ut av operasjon. Det ble da ved en feil sendt uriktig tid til en rekke andre satellitter, som førte til at de ikke lenger var synkronisert.

Forskjellen i tid var tretten milliondeler av et sekund. For lite til å sanses, men nok til å skape problemer for GPS-tidsavhengig utstyr på bakken.


Det ble oppdaget uregelmessigheter i kraftnett. Radiotjenestene til brann, politi og redning ble satt ut av spill enkelte steder i USA og Canada, og BBCs digitalradiotjeneste gikk ned for telling i to dager i enkelte områder.
Også GLONASS har opplevd problemer. I 2014 lastet russerne opp gale posisjonsdata til de 24 satellittene. Enkelt sagt sendte satellittene da ut feil posisjon, slik at mottakere på bakken kunne oppgi en posisjon på over 50 kilometer feil.
Problemet varte i 10 timer, ettersom satellittene bare kan oppdateres når de befinner seg over bakkestasjoner i Russland.
Problemer som dette kan oppstå med alle systemene, og det er egentlig ingen backupløsning tilgjengelig.
Det gjør også at et stort solutbrudd på feil tid potensielt kan sette alle systemene ut av spill. Konsekvensene av dette er uante, men det er sannsynlig at vi ville vært nødt til å gå tilbake til kart og kompass, i alle fall for en periode.
Slik virker GPS

Globale navigasjonssatelittsystemer består kort sagt av satellitter og bakkestasjoner. De forskjellige systemene er noe forskjellige, men i prinsippet fungerer de på samme måte.
Vi har tatt utgangspunkt i GPS.
GPS består av et nettverk av bakkestasjoner, og 30 satellitter, inkludert backup-satellitter, som går i bestemte baner rundt jorda, i en høyde på omtrent 20 200 kilometer.
Det er til enhver tid minst fire GPS-satellitter synlig på himmelen.
Disse satellittene sender radiosignaler til jordoverflaten. Signalene sendes som to radiosignaler på UHF-båndet, med en effekt på omtrent 50 watt. Disse kalles L1 og L2.
Dette inneholder signalene
Signalene inneholder informasjon om satellittens plassering, og tidspunktet signalet ble sendt. Signalets hastighet er kjent, da det beveger seg med lyshastighet. Satellittens hastighet på 3,9 kilometer i sekundet er også kjent.
GPS-mottakeren får informasjon om satellittenes baner tilsendt, og kan først beregne posisjon når den har denne informasjonen.

Selve signalet som sendes ut er en tilfeldig sekvens, kalt en pseudotilfeldig kode (PRN), som er kjent for mottakerenheten.
Den mottatte sekvensen sammenlignes internt i mottakeren, og mottakeren kan beregne hvor lang tid det har tatt for signalet å nå frem. Dette krever at klokken i mottakeren er synkronisert mot GPS-tiden.
Det sendes også almanakkdata, som gir informasjon om banen til samtlige satellitter i nettverket. Det sørger også for at mottakeren vet hvilke satellitter den kan forvente å motta signaler fra. Alle satellittene sender ut denne informasjonen, som kan lagres i mottakeren, og være i bruk i lang tid.
En statuslogg, eller ephemerisdata, gir informasjon om hvor hver enkelt satellitt skal befinne seg på et gitt tidspunkt. Denne informasjonen har kort levetid, og GPS-mottakeren må oppdatere denne mange ganger om dagen.
På bakgrunn av alt dette kan mottakeren regne ut avstanden til satellittene, og vite hvor de befinner seg.
Du må se minst tre satellitter

Det holder ikke å ta imot signalet fra én. Minst tre satellitter må fanges opp av GPS-mottakerens antenne for å avgjøre posisjonen via trilaterasjon. Det vil si at posisjonen avgjøres ved at man vet avstanden til tre punkter, i dette tilfellet tre satellitter.
Grunnen til at det trengs tre satellitter, er at du ved å måle avstanden til én bare kan vite at du befinner deg innenfor en viss radius av den.
Når du kjenner avstanden til tre satellitter, kan du regne ut hvor de tre radiene krysser hverandre, som vil være stedet du befinner deg.
Jo flere satellitter mottakeren tar imot signaler fra, jo mer nøyaktig blir resultatet.
I nordområdene kan det være en utfordring å se nok satellitter til at resultatet blir presist nok til at den vertikale nøyaktigheten er god. Det nye Galileo-systemet skal forbedre dette, ved at satelittene går høyere, og dermed er synlig for en mottaker lenger.
Klokken er sentral
Dette er også grunnen til at det er svært viktig at klokkene i satellittene er svært nøyaktige, og helt synkronisert.
Om for eksempel én satellitt har en tid som skiller seg fra de andre, vil GPS-mottakeren ikke kunne beregne avstanden riktig. Derfor brukes svært nøyaktige atomklokker i satellittene.
Alle satellittene sender ut signaler på samme tid, så derfor er det også avgjørende at klokkene er synkronisert.
Avstanden til satellittene og hastigheten de beveger seg i relativt til oss er også så stor at at klokkene må korrigeres for relativistiske effekter.
Atmosfæren forstyrrer
Usynkroniserte klokker er relativt uvanlig. Men radiosignalene vil påvirkes av atmosfæren.
Hastigheten på signalene vil enkelt sagt senkes når de går gjennom ionosfæren og troposfæren. Det gjøres derfor korreksjoner for dette.
Best resultat oppnås dersom mottakeren kan sammenligne signalet fra de to frekvensene som det sendes på, L1 og L2. Forsinkelsen vil da kunne regnes ut.
Dette var særlig et problem på eldre GPS-satellitter, da sivile brukere bare fikk L1-signalet. Nye GPS-satellitter sender begge.
En annen effekt som kan forstyrre signalene er refleksjon av signalet. Dersom det reflekteres av for eksempel et fjell før det kommer til mottakeren, vil det ha brukt lenger tid på å nå frem, noe som kan være en feilkilde.
Det er mange måter å forbedre posisjonen på. GPS-mottakere kan gjerne ta imot signaler fra GLONASS og Galileo, og dermed få en mer presis posisjonering.
Slik virker selvkjørende biler: Vi har bare kommet til nivå 2 av 5
Forbedring av resultatet
AGPS er en annen mye brukt metode. Dette står for «assistert GPS», og er kort sagt en metode for å bruke flere kilder enn satellittsignaler for å angi posisjon. Dette er som regel basestasjoner for mobiltelefoner. Disse har unike identifikasjonsnummer, og posisjonen er kjent. Ved hjelp av dette kan man få en grov posisjon.
Om du bruker GNSS til for eksempel bilnavigasjon, vil du som regel ganske presist plasseres i kartet der du faktisk befinner deg.
Det betyr imidlertid ikke at GNSS-enheten din har regnet seg frem til denne posisjonen ved hjelp av satellittene. Feilmarginen kan være relativt stor, så programvaren i kartprogrammet vil tippe hvor det er mest sannsynlig at du befinner deg.
Programvaren vil for eksempel anta at du befinner deg på veien, og ikke i bygningen ved siden av, og derfor plassere deg på veien. Det vil programvaren gjøre selv om navigasjonsdataene fra GNSS-satellittene antyder at du ikke er akkurat her.
Sensorer som aksellerometer og kompass i moderne telefoner vil også bidra til å angi en mer nøyaktig posisjon, retning og hastighet.
- Hvordan virker: Dette er teknologisprangene bak solcelle-revolusjonen
Bakkesegmentet
GNSS-systemer er utelukkende enveiskommunikasjon i mottakerenden. Det sendes ingen data fra mottakeren tilbake til satellitten.
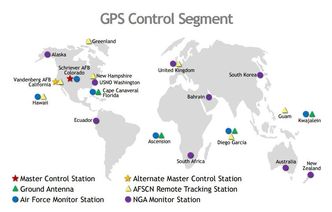
Men satellittene kommuniserer med et nettverk av ulike bakkestasjoner. I GPS kalles dette GPS Ground Segment.

Bakkesegmentet er den operasjonelle delen av systemet, og består av 15 overvåkningsstasjoner (monitor stations), en kontrollstasjon (master control station), en alternativ kontrollstasjon, og fire bakkeantenner (ground antennas).
Overvåkningsstasjonene sporer satellittenes bevegelser ved hjelp av spesielle GPS-mottakere. De samler også inn informasjon om atmosfæren. Disse stasjonene har atomklokker tilsvarende de i satellittene.
Overvåkningsstasjonene er spredt utover slik at hver satellitt til enhver tid kan «sees» av minst tre stasjoner.
Kontrollstasjonen er i Colorado, med en alternativ stasjon i California. De behandler data fra overvåkningsstasjonene for å beregne satellittenes baner og å korrigere klokkene i satellittene.
Kontrollstasjonens oppgave er å overvåke systemet, og å sørge for at det fungerer som det skal. I tilfelle noe skulle gå galt, kan de sette backup-satellitter i drift, og reposisjonere satellitter.
- Hvordan virker: DAB+
Korrigerte data sendes til satellittene

Disse dataene sendes så til satellittene fra bakkeantennene. Disse befinner seg på flere plasser rundt i verden: Florida, Ascension i det sørlige Atlanterhavet, Diego Garcia i Indiahavet, og på Kwajalein på Marshalløyene i Stillehavet.
Dataene sendes over S-båndet, den øvre delen av UHF-båndet og nedre delen av SHF-båndet. Data kan sendes til hver satellitt tre ganger om dagen, men som regel lastes det opp data en gang om dagen.
Det skal ellers nevnes at bakkesegmentet til Galileo-systemet er konfigurert noe annerledes, men de samme oppgavene utføres her, med bakkestasjoner verden rundt.
GLONASS har et tilsvarende bakkesegment, men her er alle stasjonene med ett unntak plassert i Russland.
- Les flere «Hvordan virker»-artikler.
Kilder: GPS.gov (2), BBC.com, Oceannavigator.com, UIO.no, Pocketgpsworld.com, Navipedia.net




