
TRONDHEIM: Går man den kronglete veien helt opp til taket på elektrobygget på NTNU Gløshaugen, ender man opp i en liten sal som tidligere huset et forskningsbasseng.
Nå er vannet fjernet og erstattet av sikkerhetsnett i det som er blitt en testlab for droner.
Midt oppe i eksamener og masteroppgaver er 16 studenter i ferd med å konstruere en banebrytende autonom drone.

Studentorganisasjonen Ascend NTNU ble stiftet i fjor og skal i sommer som første nordiske lag delta i International Aerial Robotics Competition (IARC) i USA.
– Målet med konkurransen er å drive teknologien for autonome droner framover. Dette er et slags drone-VM, forteller prosjektleder Marius Maaland.
- Norges mest avanserte: Her tar Forsvaret i bruk sine nye Black Hornet-droner
«Umulige» oppgaver
Mens droner først de siste årene er blitt allemannseie, har IARC eksistert helt siden 1990.
Dette er mer avansert enn å handle inn en drone på nett og kappfly denne.
I stedet presenterer konkurransen meningsfulle og nyttige oppdrag som betegnes som «umulige» å løse på det tidspunktet de lanseres, og som altså skal hjelpe utviklingen innenfor autonom robotikk.
Den første utfordringen handlet om å få en selvflygende luftfarkost til å frakte en liten plate på tvers av en gymsal.
Det tok fem år før Stanford-universitetet klarte den bragden. Senere utfordringer har stått uløst i hele sju år.
Det nåværende oppdraget som NTNU-laget skal bryne seg på, er det sjuende i rekken og ble lansert i 2014.
- Vakte oppsikt på Nato-møte: Her filmes Kerry av norsk drone
Gjeting

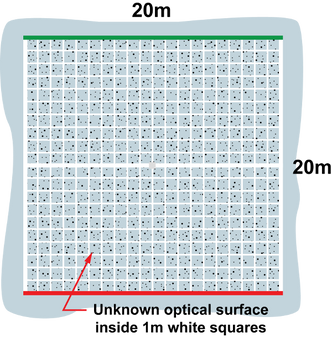
Oppgaven handler om å gjete ti bakkeroboter, som beveger seg på en vilkårlig måte, på en innendørs bane som måler 20 x 20 meter.
For å gjøre utfordringen enda litt større, er det i tillegg fire roboter som fungerer som 1-2 meter høye hindre og som kjører i sirkler.
Bakkefarkostene, som for øvrig er ombygde støvsugerroboter, kjører i en hastighet på 0,33 meter i sekundet. Hvert tjuende sekund endrer de kurs 180 grader.

I tillegg endrer de kurs hvert femte sekund, tilfeldig inntil 20 grader i hver retning.
Dronen styrer bakkerobotene ved å berøre dem på toppen. Da endrer de retning 45 grader med klokka. I tillegg vil støvsugerne snu 180 grader hver gang de støter i noe, enten en annen støvstuger eller dronen.
Målet er å geleide robotene ut av banen på samme sted i løpet av maksimalt ti minutter.
Alt dette skal altså skje autonomt. Etter at dronen letter og konkurransen starter, er det ikke lenger noen menneskelig styring på farkosten.
- Ingen om bord: F-16 avslutter livet som drone
Kunstig intelligens
– Hvis alle robotene beveget seg etter et fast mønster, ville oppgaven vært grei nok. Vi kunne bare timet det hele. Men i og med at bakkerobotene fortsetter å bevege seg tilfeldig etter at de er styrt, kreves det kontinuerlig overvåking og styring for å gjete dem til riktig sted. Her kommer AI-delen inn, altså kunstig intelligens, forklarer Maaland.
Når Teknisk Ukeblad besøker laben lykkes AI-gruppa å simulere et vellykket resultat på under åtte minutter.
De som gikk seirende ut av konkurransen i 2015, klarte å holde styr på en eller noen få bakkeroboter. Men oppgaven regnes ikke som løst, ettersom det krever at minst sju av de ti blir ledet til riktig sted.
Selv om dette er første året for Ascend, og de må bryne seg på kjente konkurrenter som Massachusetts Institute of Technology og fjorårsvinneren École Polytechnique de Montréal, stiller ikke laget som listefyll. De reiser til USA for å vinne.
Men først er det mye som må være på plass for å ha noen mulighet til å løse en så kompleks oppgave.
- Droneskvadronen på Rygge: Dette kan bli Forsvarets nye droner
Persepsjon og egen posisjon
Én ting er altså å lage en kunstig intelligens-algoritme som fungerer til formålet. Men det vil være poengløst dersom dronen ikke hadde følgende grunnleggende evne:

– Dronen må ha en forståelse av hva den ser, og den må kunne agere ut i fra dette. For at dronen skal handle riktig, må den vite hvor den er i forhold til mållinja. Dette er utfordrende, sier teknisk leder Tobias Stene Hansteen.
Konkurransearenaen er innendørs og uten vegger i ytterkant av banen, slik at verken gps eller såkalt slam-kartlegging nytter.
Det er ikke tillatt med eksterne sensorer, dog er det lov å bruke datakraft på bakken til å bidra med beregninger.

Ascend har utrustet sin drone med treghetssensorenhet (IMU), laserhøydemåler og fem kameraer. I tillegg skal de også bruke en laserskanner for å unngå kollisjon med hindrene.
Med unntak av at deler av skroget er laget i karbondeler, er alt på dronen satt sammen av rimelige hyllevarekomponenter.
Rammen er laget av karbonplater de har frest selv. Armene består av innkjøpte karbonrør, mens festemekanismen har de designet og 3D-printet selv.

Banen er inndelt i hvite ruter som måler 1x1 meter, med røde og grønne yttermarkeringer. Dronen konstrueres for å lese av rutenettet og beregne sin egen posisjon relativt til rutenettet på banen og de rød-hvite og grønn-hvite hjørnene.
Det er dessuten noen ukjente faktorer de må ta høyde for. De vet ikke om det er et mønster på bakken, altså innimellom rutenettet, eller hva slags. De vet heller ikke hva slags belysning det er i salen. Alt dette kan påvirke dronens persepsjon.
- Falcon Shield: Skal hindre marerittet med væpnede hobbydroner
Robot-kamp
IARC arrangeres parallelt i USA og Kina. Dersom flere enn to lag klarer oppgaven i år, går konkurransen over i en fase der to lags droner skal ut på arenaen samtidig og konkurrere om å gjete flest mulig til sin side.

Ascend skal delta på konkurransen som arrangeres hos Georgia Institute of Technology i Atlanta i starten av august.
NTNU-laget er ikke bare det første fra Norden. Blant årets 24 lag, er det faktisk bare to til fra Europa, fra Madrid og Istanbul.
Permanent dronemiljø
Fem av medlemmene i Ascend har bakgrunn fra studentprosjektet Revolve NTNU, som har utviklet formelbiler siden 2011.
– Vi har et mål om at dette skal leve videre når vi er ferdige på NTNU og bli noe lignende som Revolve, men for droneutvikling, sier Maaland.
Ascend NTNU
Dette er deltakerne (navn, rolle/gruppe, studieretning):
Marius Maaland, prosjektleder, datateknologi
Tobias Stene Hansteen, teknisk leder, kybernetikk og robotikk
Matias Christensen, gruppeleder persepsjon, datateknologi
Martin Sollie, gruppeleder kontroll, kybernetikk og robotikk
Simen Haugo, gruppeleder AI, kybernetikk og robotikk
Mikkel Antonsen, AI, datateknologi
Alexander Bakke, AI, datateknologi
Nils Inge Rugsveen, AI, datateknologi
Christian Wilhelmsen, mekanisk, produktutvikling og produksjon
Brage Eikanger, kontroll, kybernetikk og robotikk
Stein-Inge Torset Øien, persepsjon, kybernetikk og robotikk
Thomas Rostrup Andersen, persepsjon, kybernetikk og robotikk
Håkon Flatval, persepsjon, datateknologi
Ann Therese Kjenes, økonomiansvarlig, økonomi og administrasjon
Emilie Udnæs, markedsansvarlig, elektronisk systemdesign og innovasjon
Johan Hatleskog, tidligere prosjektleder, kybernetikk og robotikk
Derfor legges det vekt på dokumentasjon slik at kommende studenter skal slippe å begynne fra blanke ark.
Hittil har det vært attraktivt å få en plass på laget og kunne bedrive forskning og utvikling i praksis.
– Ja, det er litt mer inspirerende å prøve å løse slike problem enn det er å gjøre vanlige øvinger vi vet er blitt gjort av hundrevis av andre studenter før oss, sier Hansteen.
Tilbringer sommeren på Kongsberg
Studentene har et kunnskapssamarbeid med Forsvarets forskningsinstitutt (FFI), mens hovedsponsoren er Kongsberg Defence Systems (KDS).
Etter at eksamener er unnagjort, reiser teamet til Kongsberg i starten av juni. Her skal den siste testingen og finpussen gjennomføres før avreise til USA. Studentene er høyst velkomne til teknologibyen:
– Autonomi og robotisering er områder der vi må ha spisskompetanse om vi skal lykkes også i framtida. Et prosjekt som kombinerer dette, med store krav til innovasjon og nytenkning, er bortimot det perfekte prosjektet for oss å støtte, sier KDS-direktør Harald Ånnestad til Teknisk Ukeblad.
Konsernet arrangerer hvert år en rekke sommerstudentprosjekter. Ånnestad sier grunntanken bak er samfunnsansvaret de føler for å motivere studenter til å jobbe hardere og fullføre utdanningen, samt bidra til å skaffe dem relevant praksis.
Når det gjelder Ascend spesifikt, sier han at dette var et ambisiøst prosjekt som pekte seg ut ved å passe veldig godt inn i Kongsbergs strategi og produktportefølje. Dette er fagdisipliner selskapet er på jakt etter kompetanse innenfor, som kunstig intelligens, kybernetikk og systemtenking.
– Konkurransen handler om å sette sammen skolekunnskap på en ny og kreativ måte. De som fikser dette, er ingeniører som kan være med å løfte både Kongsberg og Norge i tida som kommer, mener Ånnestad.
- Første JSM-slipp: På dette amerikanske flyet henger Norges mest avanserte våpen



