Når de ulike delene av en kontorstol skal settes sammen, glir operasjonene smidig og automatisk ved produksjonsenheten SB Seating på Røros.
Men når hjulene skal monteres, må menneskehender ta over. De fem hjulene som ligger hulter i bulter i en kasse, må plukkes opp og plasseres i ei renne før roboter tar over igjen og setter dem på stolføttene.
Nå mener forskere fra SINTEF at de har funnet løsningen som kan effektivisere produksjonen og redusere kostnadene.
Les også: Denne dronen ser ut som en rovfugl fra bakken
Roboter for å se og gripe
Vi befinner oss i et lyst og rommelig laboratorium i Trondheim. Her har arbeidet med å optimalisere produksjonslinja til industrien pågått.
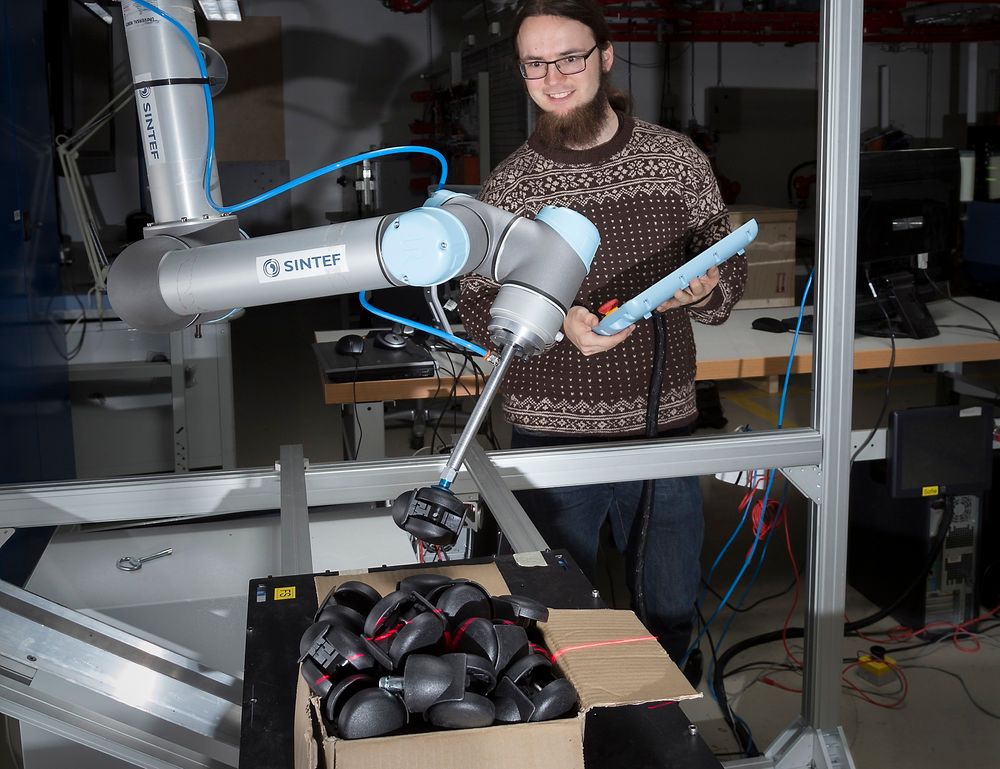
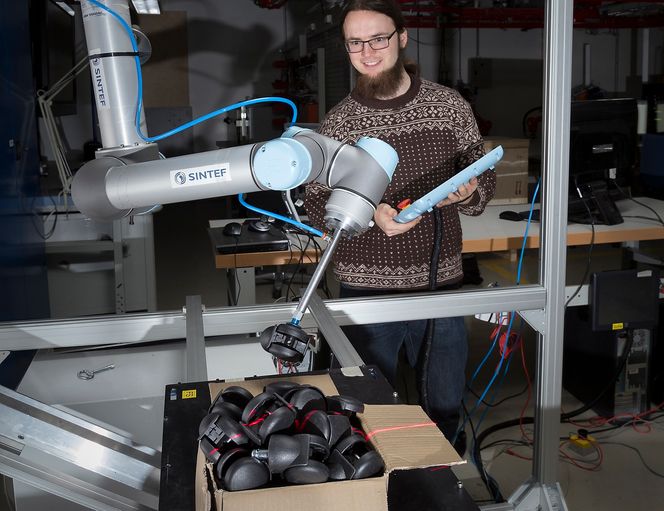
Forsker Sigurd Albrektsen har rigget seg til med pc'en rettet mot oppsettet av to robotarmer og en kasse med hjul. Han forteller at den ene roboten er utstyrt med gripeverktøy, mens den andre har 3D-syn (laser og avansert kamera) som gjenkjenner/finner posisjonen til ulike deler.
– Griperoboten kan plukke hjulene på fire ulike måter, forklarer han mens han trykker på startknappen. –Det er viktig siden de ligger i ulike posisjoner.
Siden SB Seating produserer en stol i løpet av 20 sekunder, må forskerne få roboten til å plukke et hjul hvert 4. sekund. Og i løpet av de neste sekundene hentes da også hjulene kjapt opp av kassen av griperoboten.
Les også: Om ti år kan vi alle ha en robot-slave i huset
Langt i utviklingen
"Bin-picking" har vært et problem i alle forskningsmiljø i mange år, kan prosjektleder Svein Peder Berge på SINTEF IKT opplyse.
– Dagens plukke-roboter er flinke til å plukke deler som ligger i bestemte posisjoner, men ikke om de ligger usorterte i en eske. Nå forteller vi roboten hvilket hjul den skal plukke ved å bruke en tegning (CAD-modell). Vi lærer roboten å gjenkjenne hjulet og hvordan det ligger i esken så den kan gripe dette nøyaktig og greie å plukke uansett hvordan hjuldelene ligger i esken.
Les også: Her er robotene som legger fliser og borer hull
Løsning med videre perspektiv
Stein Are Kvikne fra SB Seating sier at plukking av hjul er valgt som et aktuelt case fordi bedriften nå bruker en robotmontasjecelle som monterer hjul inn i fotkryss.
– I dag må hjulene magasineres opp manuelt av en operatør. Det er en jobb som ikke er spesielt utfordrende for et menneske og heller ikke optimal ut fra et HMS-perspektiv. Om vi velger å automatisere akkurat denne operasjonen vil det i all hovedsak være motivert ut fra slike hensyn, sier Kvikne. Produktivitetsgevinsten får vi igjen i form av bedre arbeidsmiljø og bedre utnyttelse av operatørens kjernekompetanse.
Men Kvikne understreker at roboten fra SINTEF viser løsninger som har interesse langt ut over plukking av stolhjul:
– De demonstrerer en generisk teknikk hvor man kan håndtere mange ulike komponenter i samme løsning. Kombinasjonen av 3D-vision, en fleksibel robot/griper og en 3D- CAD modell av komponenten, gjør at vi kan plukke komponenten direkte ut fra transportemballasje uten annen håndtering. Vi ser at vi nå er veldig nær en løsning som det er aktuelt å investere i for oss, både fra et teknologisk og økonomisk perspektiv, opplyser Kvikne.

Denne saken ble opprinnelig publisert på Gemini.no – et nettsted for forskningsnytt fra NTNU og Sintef. Artikkelforfatteren er tilknyttet NTNU.
Flere saker fra Gemini:
Selvgående robot kan gjøre bonden rikere
Tunnelområde gjennomhullet av gruver
Oljerør varsler om egen helse