Slik kontrollerer du et 700 tonns beist av et stålrør midt på det åpne hav

Havbaserte vindmølleparker reises ved at man først slår opptil 75 meter lange, 7 meter brede og 700 tonn tunge stålrør ned i havbunnen. Jobben utføres av et oppjekkbart skip som frakter stålrørene ut til havs, løfter dem ned i vannet og hamrer dem ned i havbunnen på dyp opptil 40 meter.
Dette stålrøret utgjør da selve fundamentet for vindmøllen, og det er derfor essensielt at det holdes helt rett mens det bankes ned av en enorm hammer. Utfordringen blir ikke lettere av at vindmøller gjerne plasseres i områder med stabilt mye vind og dertil sterke havstrømmer og bølger som river i riggen. Om riggen flytter på seg og stålrøret drives skjevt ned, må det tas opp og hamres ned igjen - en mildt sagt kostbar operasjon.
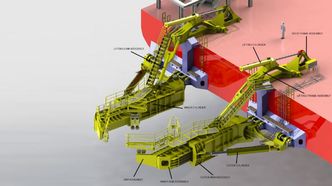
For den britiske vindmølleinstallatøren Houlder ble løsningen to enorme mekaniske armer. Disse kan kontrolleres på alle akser, motstå vind og havstrømmer, og holde stålrøret helt rett mens det drives ned. Systemet har fått det passende navnet «Pile Gripper Arms», og står installert på baugen av det oppjekkbare skipet MPI Discovery.
Programvaren og styringssystemene som kontrollerer den imponerende konstruksjonen ble utviklet av Industrial Systems and Control, en partner av National Instruments. Dette er historien om hvordan de solide mekaniske komponentene ble konstruert, og hvordan man laget programvare og styringssystemer som gjør det mulig å kontrollere beistet med millimeterpresisjon.
Som en hyggelig, 70-tonns klem

Hver av de to gripearmene styres av hydrauliske stempler. Ett stempel løfter og senker hele anordningen opp i en lagringsposisjon, slik at den står trygt under overfarter. I tillegg har hver arm to stempler som justerer armen på X- og Y-aksen, og armene kan både jobbe synkronisert og usynkronisert ved behov, for å sørge for at stålrøret holdes vertikalt til enhver tid.
Selv om de kraftfulle armene skal holde 700 tonn med stål stabilt i det ruvende havet, må det gjøres på en måte som minner mest om en ømfintlig klem – for å ikke knuse røret.
Testing var derfor spesielt viktig, men den rent fysiske størrelsen til armene gjorde det umulig å teste det komplette systemet på land. Med en egenvekt på 70 tonn per arm, fordelt på en generelt sett veldig stor og kraftfull konstruksjon, var det ikke plass i fabrikken til montering og test av systemet. Det var først mulig å teste det endelige kontrollsystemet når armene var montert på et skip
MPI Discovery fikk æren av å få systemet først, og testene til sjøs ble passert med glans før skipet satte kurs mot vindmølleparken Humber Gateway åtte kilometer fra kysten ved Grimsby i Storbritannia. Der skulle stålrør-fundamentet til fire nye vindmøller installeres på 18 meters dyp.
Med et årvåkent øye fra ingeniørene hos Industrial Systems and Control grep de massive armene fast i stålrøret, og holdt det perfekt vertikalt i den mange timer lange operasjonen med å hamre røret 50 meter inn i havbunnen. Systemet fungerte ypperlig, og med bare noen små finjusteringer var det etter kort tid klart for bruk.
Kontrollsystemet


Til tross for at «Pile Gripper Arms» er en kraftig løsning som håndterer store konstruksjoner, kan det hele kontrolleres fra et lite panel operatøren kan bære med en skulderreim. Takket være kontrollsystemet, som er bygget på National Instruments CompactRIO-komponenter, skal det ikke mer enn en liten joystick til for å hårfint kontrollere den 70 tonn tunge konstruksjonen på alle akser.
Industrial Systems and Control designet selv en algoritme som tar i betraktning vandringen til hydraulikk-stemplene til armene, slik at de kan kalkulere akkurat hvor mye mer trykk som må settes på stemplene for at armen skal bevege seg til ønsket posisjon.
I tillegg er det bygget inn sikringsmekanismer i algoritmen, som blant annet sørger for at armene aldri kan stramme seg så mye at de knuser stålrøret de manøvrerer.
Det er blant annet mulig fordi National Instruments programvare LabVIEW, også lytter til data fra flere sensorer og aktivatorer koblet til armen. Det gjør det mulig for systemet til enhver tid å vite akkurat hvor armen er i forhold til røret, og selv aktivere nødstopp-funksjoner om noe galt skulle oppstå.
Til syvende og sist tok det ikke mer enn et par måneder fra konsept, gjennom implementering og testing, til det endelige produktet var klart til bruk. Den raske utviklingen skyldes blant annet at «Pile Gripper Arms» er utviklet med LabVIEW og CompactRIO-komponenter for kontroll og styring:
– Resultatet her er at vi har klart å kombinere tungindustri, mekanikk og hydraulikk med presisjonskontroll, sier Frederic Perdrix, teknisk sjef i operatøren Houlder.



