
Cruisekontroll
- Cruisekontroll er et godt eksempel på utviklingen.
- Det startet som en enkel hastighetsregulering av bilen slik at den automatisk holdt konstant fart uten at sjåføren trengte å bruke gasspedalen.
- Med sensorer for avstandsmåling kunne man låse bilen til kjøretøyet foran slik at bilen holdt seg på plass i trafikkbildet.
- Allerede neste år kommer Volvo med en variant som også ser hvordan kjøretøyet foran svinger og kan regulere forhjulene så det holder følge både i kurs og hastighet. Perfekt for køkjøring.
Den smarte bilen er ingen brå overgang slik som da Apple lanserte Iphone, men en glidende utvikling drevet frem av økende datakraft koblet til sensorer og kommunikasjon.
Poenget er å gjøre det mye sikrere og mer behagelig å kjøre bil.
.png)

Kjører selv
I enden av denne teknologiutviklingen finner vi den selvkjørende bilen som gjør at sjåføren kan overlate jobben til bilen og bli passasjer.
Slike biler finnes allerede, men det er prototyper. Før mennesket tillates å slippe rattet vil teknologien være velutviklet.
Det største hinderet er lovgivningen. Det vil nok ta mer enn ti år før vi vil kan kjøpe autonome automobiler og ta de ut i trafikken.
De vil først bli tillatt brukt på motorveier, hvor all trafikk beveger seg i samme retning, og de skal nok bevise sine evner noen år før vi får bruke dem i bytrafikk med veikryss, motgående trafikk, syklister og fotgjengere.
Video: Se hvordan bilen hopper unna fotgjengeren
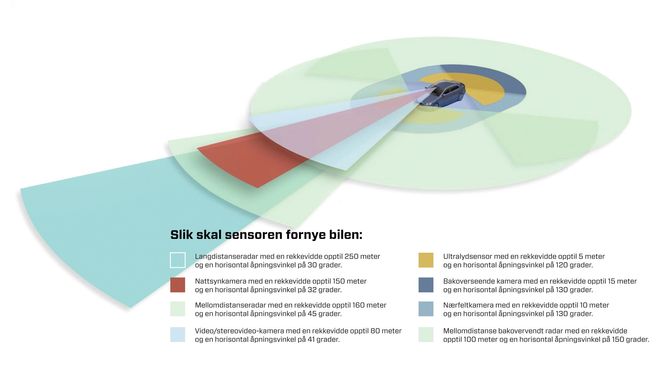
Bilens øyne og ører
Det å gjøre bilen sikrere har vært en utvikling som har pågått i tiår og som har gitt oss ting som sikkerhetskarosserier, sikkerhetsbelter, airbager, ABS, ESP og en rekke andre passive og aktive detaljer.
Resultatet er at antall dødsulykker i bil er mer enn halvert på 30 år på tross av trafikkøkningen. Men for å komme videre ned til null, som bilprodusentene snakker om, trengs mer ny teknologi.
Bilen må skaffe seg en oppfatning av trafikkbildet og varsle føreren gjennom lyd, lys eller vibrasjoner, eventuelt en kombinasjon.
Mer avansert programvare i kombinasjon med mekanikk vil kunne handle i form av å styre eller bremse om ikke sjåføren gjør det. Det avgjørende for at denne utviklingen skal finne sted er sensorer og programvare.
Informasjonen fra sensorene må behandles for å bli nyttig, og informasjonen må kunne varsle føreren om farlige situasjoner, eller gjøre at bilen selv kan ta affære.
I tillegg vil deler av førerens oppgaver bli automatisert.
Les også: Slik ser nye Leaf ut på innsiden
Ikke dyrt
Ifølge Bosch vil merkostnaden for en bil som kan kjøre helautomatisk ligge på under 20.000 kroner.


Det inkluderer sensorer, programvare og mekanikk. Men lenge før vi kommer dit vil bilene ha en avansert sensorplattform som vil bli brukt til å automatisere oppgaver og øke sikkerheten.
Merprisen for helautomatisk kjøring vil derfor bli mye lavere når det blir aktuelt, fordi dette «sluttmålet» vil bygge på alt som allerede er blitt standardutstyr.
Utviklingen drives fremover av lovverk som krever stadig mer sikkerhet, både for folkene i bilen og omgivelsene rundt.
Radar
Biler har hatt radarsensorer i mange år. De kan ses som små rundinger i støtfangeren foran og bak og brukes til korthold avstandsmåling.
Typisk hjelper de til når man skal parkere bilen og varsler om man kommer for nær et annet objekt.
Snart vil de bli supplert av radarer som ser mye lenger både forover og bakover og kan følge med i trafikkbildet.
Les også: Svinghjul skal gjøre ny Volvo mer effektiv

Kamera
Ett eller flere kameraer i ulike optiske spektre er kanskje den nyttigste sensoren som vil prege bilene fremover.
De kan se fremover og i andre retninger og hjelpe føreren med en rekke toppgaver. Bosch har utviklet et system med to kameraer 12 cm fra hverandre som svært nøyaktig kan måle høyde og avstand til objekter over 50 meter foran.
De har vist hvordan det kan utnyttes til å unngå å kjøre på folk og hvordan det sammen med ultralydsensorer kan brukes til å kjøre raskt og trygt gjennom smale soner hvor det jobbes på veien.
Kameraer vil også kobles til programmer som gjenkjenner skilt, fotgjengere, elg og andre ting føreren må være oppmerksom på.
Hvis ikke sjåføren reagerer, bremser eller svinger bilen automatisk.
Ultralyd
Ultralydsendere og mikrofoner vil først og fremst benyttes på kort hold, tre til fem meter, hvor de er svært nøyaktige.
Det mest aktuelle område er å bruke dem i forbindelse med parkeringsassistanse og til å varsle føreren om hindre i nærheten.

Laser
Radar, kamera og ultralyd er allerede på markedet i noen biler og blir stadig billigere og bedre.
Før den autonome bilen skal bli en realitet trengs det nok et sensorsystem. Ikke for å skaffe mer informasjon enn det de tre andre gjør, men for å gi redundans i tilfelle ett eller flere av de andre faller ut.
De testbilene som har vært på veiene i USA og i Europa har en takmontert laserskanner som gjør denne jobben.
Laser peker seg ut som en god teknologi for å gjøre denne jobben, men sensoren/-ene blir nok bygget inn i bilen på en mye mer elegant måte.
Les også: Turboen har revolusjonert dieselmotoren. Nå står bensinmotoren for tur
Kommunikasjon
I tillegg til den informasjon bilen kan skaffe seg selv gjennom sensorer kommer det den kan kommunisere. Her planlegges det to former; Bil til bil og bil til infrastruktur.
Den første vil sannsynligvis være basert på en form for wifi og gjør at bilene innen en viss rekkevidde automatisk kan kommunisere og kan fungere som relestasjoner bakover.
Hvis en bil aktiverer stabilitetskontrollen (ESP), vil det bli kommunisert bakover at det er glatt.
Bil til infrastruktur vil kommunisere via mobilnettet og her er det bare fantasien som begrenser de funksjonene som kan bygges inn.
Les også:
Smart cruisekontroll sparer drivstoff




