Kongsberg Maritimes autonome undervannsfartøy Hugin har blitt en eksportsuksess de siste årene, med over 30 farkoster produsert og solgt.
Les også:
Men Hugin har, som alle AUVer på markedet, sine begrensninger. Med en form som en torpedo er den relativt hurtig, og har stor rekkevidde, men manøvrerbarheten ved lave hastigheter er mindre.
En ROV er manøvrerbar, kan gjøre undervannsarbeid og kontrolleres fra overflaten via en kabel. Men kabelen reduserer bevegeligheten.
Propeller og ror
De to NTNU-forskere Even Børhaug og Thomas Krogstad tok det beste fra begge ubåttypene og videreutviklet dem i en autonom undervannsfarkost som kan bevege seg fritt som en AUV, men har propeller og ror som øker manøvrerbarheten.
I motsetning til Hugin, kan Munin stå på stedet hvil, skynde seg framover, stoppe opp, skifte retning, bevege seg sidelengs, opp og ned. Alt uavhengig av havstrømmer og andre ytre påvirkninger.
– Hugin har sine begrensninger fordi den er torpedoformet, med en propell og ett ror bak. Den er verdensmester til å gjøre akkurat det den er designet for, men Munin har i tillegg propeller og ror for sideveis og vertikal bevegelse. Dette gjør den mer manøvrerbar for andre typer oppgaver, sier Erik Kyrkjebø, seniorforsker i Sintef IKT til Teknisk Ukeblad.
Etter at de to NTNU-forskerne var ferdige med sin doktorgrad har han ført arbeidet med Munin videre.
Forskningsplattform
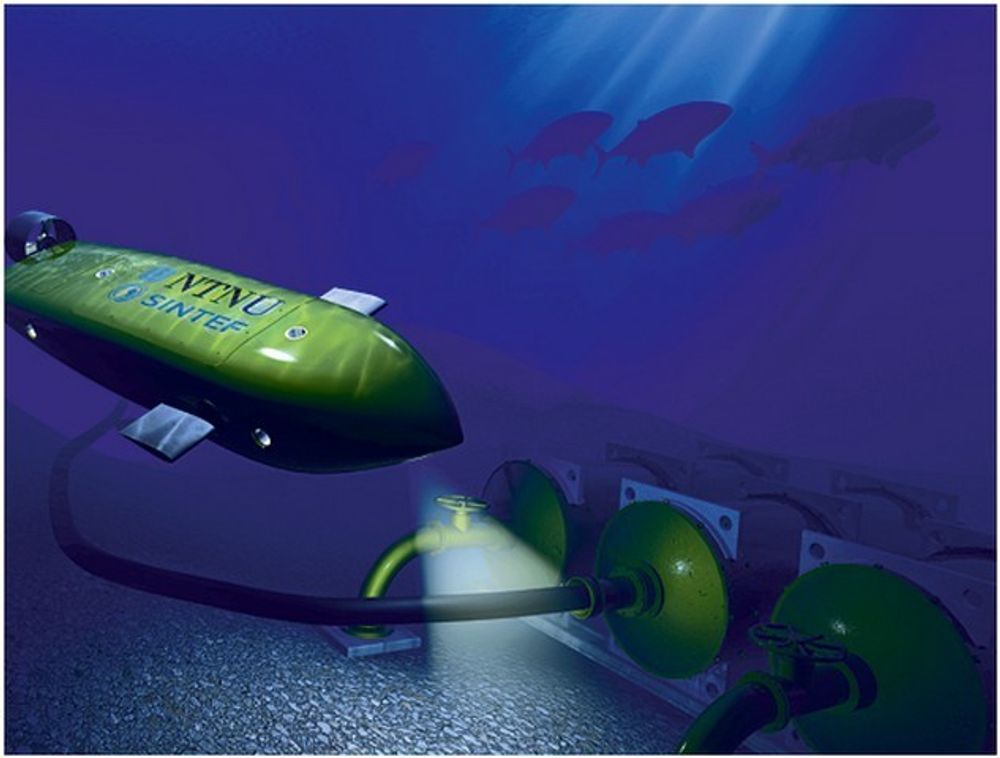
– Munin er en forskningsplattform, som ikke er tiltenkt noe industrielt oppdrag. Den har blitt brukt til å teste ut algoritmer for rørledningsinspeksjon under vann, bruke kamera, inspisere for å se etter strukturelle skader og så videre, sier Kyrkjebø.


I motsetning til rundt fem meter lange Hugin er Munin bare halvannen meter lang, er utstyrt med stereokamera for å se ting på havbunnen i et 3D perspektiv, og har muligheter for å stå helt stille i vannet for tett inspeksjon av undervannsstrukturer.
– Den var i utgangspunktet ikke tiltenkt å drive fysisk vedlikehold, men inspeksjon. Den kan kjøre fritt rundt rørledningen for å inspisere fra alle vinkler, sier seniorforskeren, som legger til at det også er mulig å inkludere en robotarm i fremtiden på Munin slik den er konstruert.
Som med Hugin, har Sintef-forskerne fokusert på å utvide autonomien til sitt testfartøy.
Kan havne på Hugin
– Vi har laget algoritmer for læring og autonomitet. At farkosten selv kan følge og inspisere en rørledning. Meningen er at AUVen skal bli mer intelligent, at den skal kunne ta flere avgjørelser og ha en bedre oppfatning av situasjonen rundt seg, sier Kyrkjebø til Teknisk Ukeblad.
– Den skal selv kunne avgjøre at den ser noe interessant og gjøre flere undersøkelser, legger han til.
Men Kyrkjebø understreker at det ikke er en konkurrent til Hugin.
– Dette er kun en testplattform, sier han.


Dermed kan egenskaper som er utviklet på Munin med tid og stunder havne på Hugin.

