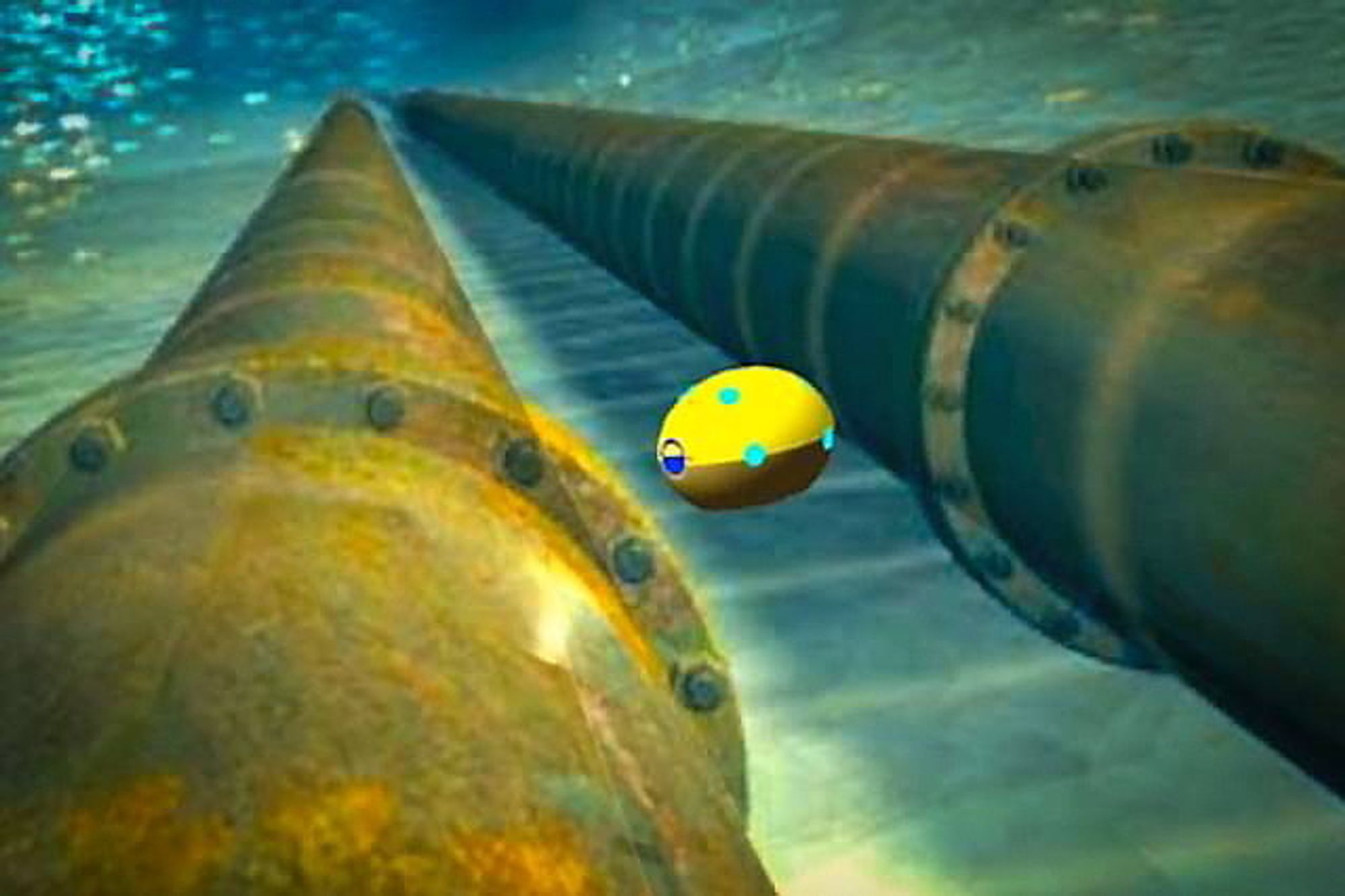
MIT-forskere er i ferd med å utvikle en oval undervannsrobot som kan smyge seg inn på båtskrog og foreta ultralyd-undersøkelser for å finne uregelmessigheter.
Roboten skal være i stand til å oppdage falske skrog og falske propellakslinger som ifølge MIT skal være vanlige plasser å gjemme smuglergods.
Les også: Denne undervannsroboten kan du bygge selv

Framdrift med gummirør
Roboten er delt i to halvdeler. Den ene delen er vanntett og huser elektronikken med tre akselerometer, tre gyroskoper, batteri, antenne og kretskort.
Den andre halvdelen er dedikert til fremdriftssystemet og består i hovedsak av seks pumper som driver vann ut av gummirør som gjør at farkosten kan bevege seg.
Energikilden skal være litiumionebatterier som kan lades trådløst. Disse skal gi robotene cirka 40 minutters driftstid, men forskerne sier de håper å øke dette til 100 minutter.
Les også: Denne dronen skal frakte medisiner til en øy i Nordsjøen

Lav pris
Forskerne bak roboten tror dette kan bli et rimelig alternativ til dagens undervannsroboter.
– Det er veldig dyrt for havnevakta å bruke tradisjonelle roboter for hver lille båt som kommer inn til havna, sier ingeniørstudent i mekaniske fag Sampriti Bhattacharyya i en pressemelding.
Han har stått for å lage skallet på roboten ved hjelp av en 3D-printer.
– Om jeg kan få den ut for 600 dollar, hvorfor ikke bare ha 20 av dem som samarbeider og inspiserer samtidig? Hvis den går i stykker, er det ingen stor sak. Den er veldig lett å lage, sier Bhattacharyya.
Les også: Dette skipet er utslippsfritt og har ingen mennesker ombord
Ikke i mål med ultralyd
Per i dag er prototypen på teststadiet og ultralydsensoren er ennå ikke implementert.
Ultralyd-skanningen fungerer bare når senderen er i direkte berøring med objektet som skal skannes, eller uten overflatekontakt ved en viss avstand, ifølge MIT.
Nå jobber forskerne med å utforske mekaniske systemer som skal skape hydrodynamiske buffere som gir akkurat passe dybde til å skanne uten direkte kontakt med skrogets overflate.

%2520propulsion%2520pic%25206.jpg)
200 meter lange lasteskip skal dure over havet uten skipsfører
Stine-Marie (23) utvikler høyteknologisk luftskip med dynamisk posisjonering