


Senteret ble offisielt åpnet i juni i fjor som et samarbeid mellom to Sintef-avdelinger og to NTNU-institutter. Det faglige miljøet består i dag av 11 forskere og seks professorer. De jobber med alt fra vedlikeholds og inspeksjonsroboter via selvnavigerende mobile slangeroboter, beslutningssystemer for fjernopererte systemer til sensorstyrte industriroboter og automatiserte produksjonssystemer.
Økende interesse
– Vi merker at interessen for robotteknologi i industrien er økende, særlig har det vært merkbart de siste par årene, sier Ingrid Schjølberg, som er leder for robotikksenteret i Trondheim.
Dette gjelder ikke bare for norsk industri, men også for hele EU-området. Fokus er økt effektivitet for på den måten å hindre at europeisk industri forsvinner til lavkostland.
Det er flere EU-programmer med dette som tema. Schjølberg forteller at Trondheims-miljøet har vært med i tidligere EU-programmer. – Vi søkte om deltakelse også i fjor, men nådde ikke opp. Men vi forsøker igjen i år, sier hun.
Robotplattformer
En stor del av virksomheten ved senteret er så langt finansiert gjennom et oppdrag for StatoilHydro. Så langt har de bidratt med ca 10 millioner kroner. De har satt seg som mål å ha sin første robotiserte plattform klar innen 2015.

For å få dette til har de engasjert Gemini-senteret i Trondheim. De skal finne ut hvordan robotene kan fjernstyre overvåkingen og styringen av prosessene på en plattform. De skal blant annet vurdere hvilke sensorer og verktøy robotene må utstyres med. De må også finne frem til styringssystemer slik at robotene ikke kolliderer med utstyret om bord.
Grovt vil robotene på plattformen få to hovedoppgaver som skal utføres i sanntid. Den ene er inspeksjon og innsamling av relevante måledata fra prosessutstyret. Den andre, og mest utfordrende, er å foreta oppgaver hvor robotens verktøy er i berøring med forskjellige typer plattformutstyr.
Grunnen til at StatoilHydro satser på et slikt ubemannet plattformkonsept er ganske enkel; økonomi. Ved å flytte en del operasjoner som i dag foregår under vann opp på en plattform, kan marginale felt utnyttes bedre. Både investeringer, vedlikehold og drift blir billigere på denne måten.
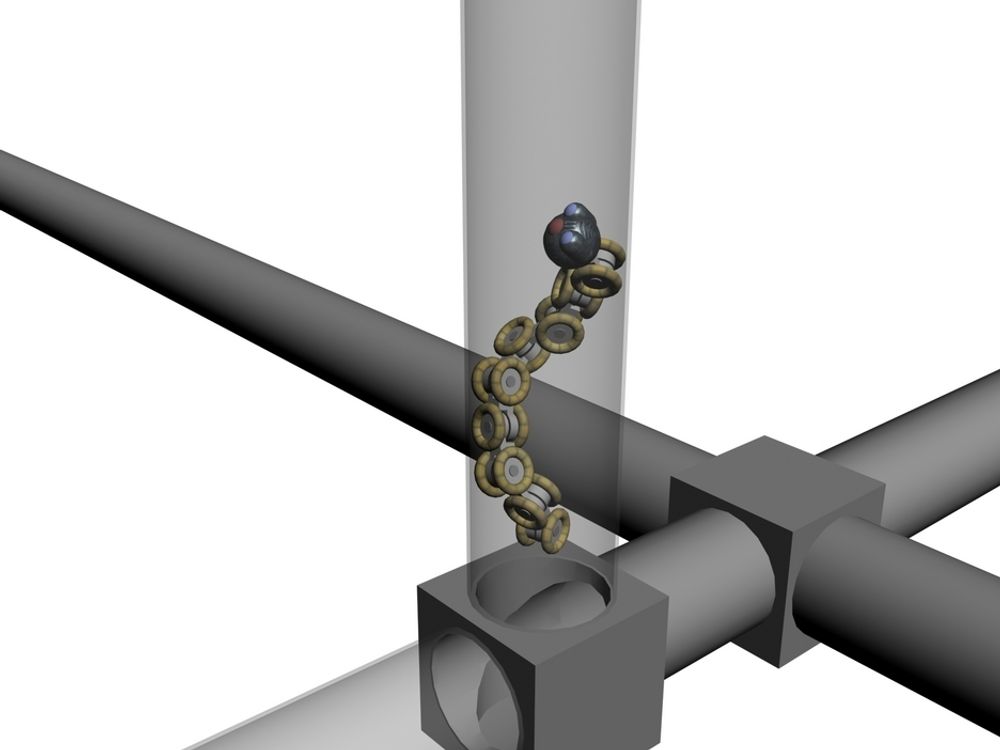
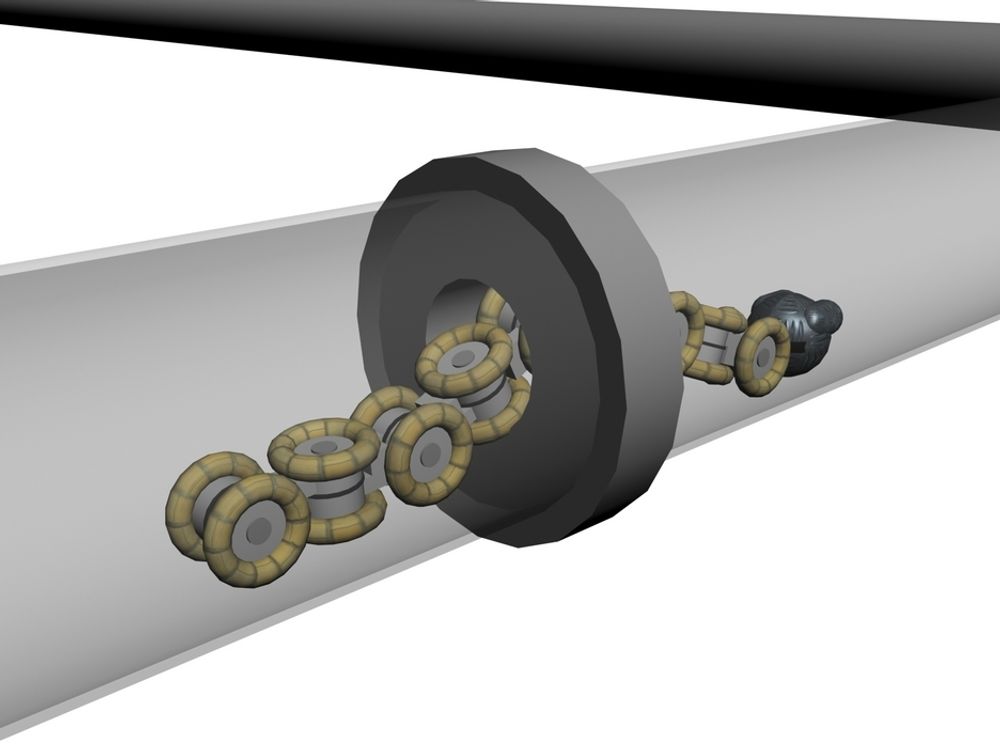
Slangeroboter
Et mer spesialisert felt er slangelignende roboter, hvor Gemini-senteret i Trondheim er ett av tre steder i verden hvor man arbeider med slike løsninger.
– Vi har allerede utviklet flere prototyper, selv om den direkte nytteverdien nok ligger noen år frem i tid, sier Schjølberg.


Disse beveger seg i sinusform på samme måte som biologiske slanger, dog ved hjelp av et antall elektriske motorer. De kan ta seg frem der mange andre mer tradisjonelle robotløsninger ikke ville fungere.
En av prototypene har fått det velklingende navnet Anna Konda. Dette er verdens største og sterkeste vannhydrauliske robot. Den er tre meter lang og 70 kilo tung. Den skal kunne sno seg rundt på egen hånd inn i brennende bygninger. Den drives av trykket i brannslangen, og foran har den et hode som kan styre vannet i alle retninger for å slukke branner.




